Paso 11: mein completter código
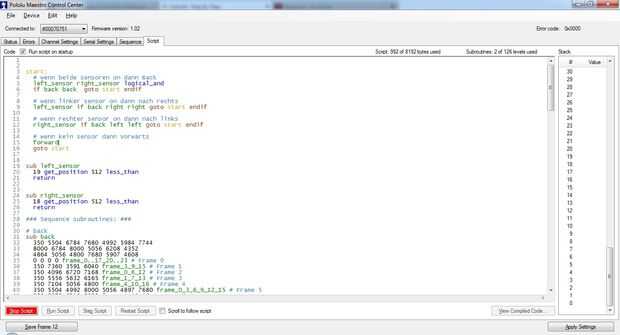
# wenn beide sensoren en dann espalda
left_sensor right_sensor logical_and
Si volver atrás goto Inicio endif
sensor de vinculador # wenn dann nach der.
left_sensor si detrás derecha derecha goto Inicio endif
sensor de rechter # wenn dann enlaces de nach
right_sensor si se deja atrás la izquierda goto Inicio endif
# wenn kein sensor dann Vorwärts
hacia adelante
Goto Inicio
Sub left_sensor
19 get_position 512 less_than
volver
Sub right_sensor
18 get_position 512 less_than
volver
### La secuencia de subrutinas: ###
detrás de la #
Sub detrás
350 5504 6784 7680 4992 5984 7744
6784 de 8000 8000 5056 6208 4352
4864 5056 4800 7680 5907 4608
0 0 0 0 frame_0..17_20..23 # marco 0
350 7360 3591 6040 frame_3_9_15 # 1 de marco
350 4096 6720 7168 frame_0_6_12 # 2 marco
350 5556 5632 6165 frame_1_7_13 # marco 3
350 7104 5056 4800 frame_4_10_16 # 4 marco
350 5504 4992 8000 5056 4897 7680 frame_0_3_6_9_12_15 # 5 marco
350 5973 6219 5929 frame_4_10_16 # 6 marco
volver
# adelante
Sub adelante
100 5504 5556 7680 4992 6016 7744
8000 5699 8000 5056 6129 4352
4864 6048 4800 7680 5896 4608
0 0 0 0 frame_0..17_20..23 # marco 0
100 7104 5056 4800 frame_4_10_16 # 1 de marco
100 4096 7360 6726 3584 7123 6016 frame_0_3_6_9_12_15 # 2 marco
100 5984 6208 5907 frame_4_10_16 # marco 3
100 6784 6784 5056 frame_1_7_13 # 4 marco
100 5504 4992 8000 5056 4864 7680 frame_0_3_6_9_12_15 # 5 marco
volver
# izquierda
izquierda de sub
300 5504 5556 7680 7360 5994 7744
5643 de 8000 8000 5056 6185 4352
7168 6122 4800 7680 5896 4608
0 0 0 0 frame_0..17_20..23 # marco 0
300 4096 4992 6720 3584 4864 6040 frame_0_3_6_9_12_15 # 1 de marco
300 6606 6784 5056 frame_1_7_13 # 2 marco
300 5504 8000 7168 frame_0_6_12 # marco 3
300 5568 5598 6112 frame_1_7_13 # 4 marco
300 7104 5078 4800 frame_4_10_16 # 5 marco
300 4096 7360 6720 5056 4864 7680 frame_0_3_6_9_12_15 # 6 marco
volver
derecho #
Sub derecha
300 4806 5556 7680 6176 5994 7744
7372 5643 8000 4334 6185 4352
5993 6122 4800 6856 5896 4608
0 0 0 0 frame_0..17_20..23 # 2 marco
300 5504 7360 8000 5056 7168 7680 frame_0_3_6_9_12_15 # 1 de marco
300 4096 6784 6720 6784 4864 5056 frame_0_1_6_7_12_13 # 2 marco
300 5579 5643 6133 frame_1_7_13 # marco 3
300 7104 5056 4800 frame_4_10_16 # 4 marco
300 5504 4992 8000 3584 7168 6016 frame_0_3_6_9_12_15 # 5 marco
volver
Inicio #
Inicio sub
500 4820 5603 7680 6187 5984 7744
7360 5620 8000 4327 6208 4352
5993 6122 4800 6823 5907 4608
0 0 0 0 frame_0..17_20..23 # marco 0
500 4387 6132 4864 6159 4480 6368
7348 5828 7210 6337 7104 6061 frame_1_2_4_5_7_8_10_11_13_14_16_17 # 1 de marco
500 4096 4992 6720 3598 4864 6016 frame_0_3_6_9_12_15 # marco 3
500 5504 7360 8000 5056 7168 7680 frame_0_3_6_9_12_15 # marco 3
500 4779 6164 7372 4334 5982 6848 frame_0_3_6_9_12_15 # 4 marco
500 5568 7650 5994 7744 5632 8000
6219 4352 6154 4800 5929 4608 frame_1_2_4_5_7_8_10_11_13_14_16_17 # 5 marco
200 5504 7360 8000 5056 7168 7680 frame_0_3_6_9_12_15 # 6 marco
200 4096 4992 6720 3584 4864 6016 frame_0_3_6_9_12_15 # 7 marco
200 5504 7360 8000 5056 7168 7680 frame_0_3_6_9_12_15 # 9 marco
200 4096 4992 6720 3584 4864 6016 frame_0_3_6_9_12_15 # 7 marco
200 5504 7360 8000 5056 7168 7680 frame_0_3_6_9_12_15 # 9 marco
200 4800 6176 7360 4334 6038 6848 frame_0_3_6_9_12_15 # 8 marco
volver
Sub frame_0..17_20..23
23 servo
22 servo
21 servo
servo de 20
17 servo
16 servo
servo de 15
14 servo
servo 13
12 servo
servo 11
10 servo
servo 9
8 servo
7 servos
6 servos
5 servos
4 servo
servo 3
2 servos
1 servo
servo 0
retardo de
volver
Sub frame_3_9_15
servo de 15
servo 9
servo 3
retardo de
volver
Sub frame_0_6_12
12 servo
6 servos
servo 0
retardo de
volver
Sub frame_1_7_13
servo 13
7 servos
1 servo
retardo de
volver
Sub frame_4_10_16
16 servo
10 servo
4 servo
retardo de
volver
Sub frame_0_3_6_9_12_15
servo de 15
12 servo
servo 9
6 servos
servo 3
servo 0
retardo de
volver
Sub frame_0_1_6_7_12_13
servo 13
12 servo
7 servos
6 servos
1 servo
servo 0
retardo de
volver
Sub frame_1_2_4_5_7_8_10_11_13_14_16_17
17 servo
16 servo
14 servo
servo 13
servo 11
10 servo
8 servo
7 servos
5 servos
4 servo
2 servos
1 servo
retardo de
volver
")
")

")






. ¿")


