Paso 1: Diseño de proyectos
Elegimos una forma hexagonal simétrica para hacer un robot que fácilmente podríamos hacer moove en cada dirección y grandes dimensiones para trabajar con más facilidad en las piezas.
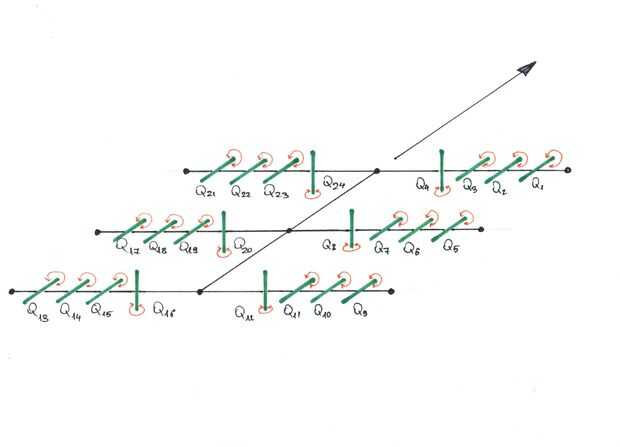
Cada pata tiene 4 grados de libertad, la primera curva en un eje vertical y los otros 3 se dobla sobre un eje horizontal (Foto 1), el robot de un movimiento más suave y permite configuraciones más posible y es aproximadamente 0,5 m de largo. El movimiento de cada curva es controlado por un servo motor.

")





")
. ¿")



")

")