Paso 12: "me siento una extraña perturbación en la fuerza..."
Tenía la esperanza de conseguir 20-30 centímetros de la gama, pero no parece posible a través de tres grosores de acrílico. Además, los cambios de sensibilidad dependiendo de si el holocrón está conectado (así, conectado a tierra) a un ordenador. Así que para evitar falsos disparos, el capsense se marca hasta donde tienes que tocar ligeramente la superficie antes de se disparará.
En ese momento el holocrón hace un pequeño espectáculo de luz, como si la presencia de un sensible a la fuerza ha despertado, entonces después de treinta segundos o así que se desvanece hacia el habitual resplandor suave.
Los chips AVR pueden hacer capacidad de detección de forma nativa. Atmel cuenta con una biblioteca gratuita. Pero puede también hacerlo a través de la IDE de Arduino, utilizando la biblioteca capsense de la Arduino Playground. El funcionamiento de la biblioteca, el pin de "enviar" se utiliza para carga con el conector de recepción a través de una resistencia grande. El tiempo que tarda ese perno para alcanzar el umbral es dependiente en el valor RC; por lo tanto, añadiendo la capacidad de un cuerpo humano cambia.
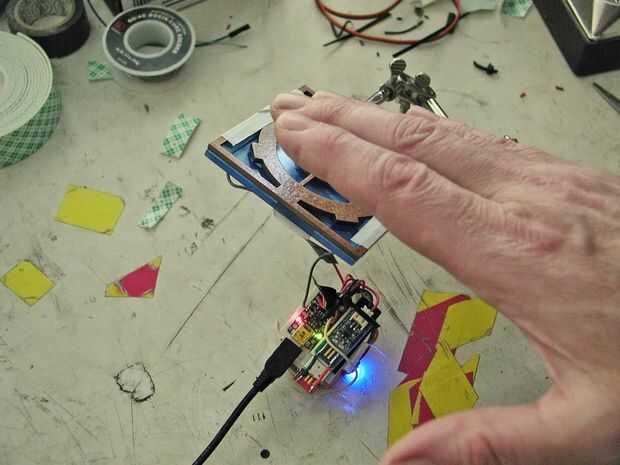
Con una resistencia de 1 megohmio, tacto real se requiere. Con diez ohmios de meg, puede desencadenar desde unas pocas pulgadas de distancia, y con más que eso, usted puede empujarlo hacia fuera a un pie o más. Desafortunadamente, esto también aumenta el tiempo de sentido, y para mantener el resto del circuito funcionando suavemente encontré que era mejor quedarse con un valor de gama media.
Por supuesto, sensor circuitos siempre funcionan de forma diferente en el cuadro. Una vez que el holocrón fue montado completamente, tuve que ajustar la sensibilidad--regresando y cambiando uno de los parámetros en el software.



")





")



