Paso 1: Diagrama de concepto y diseño
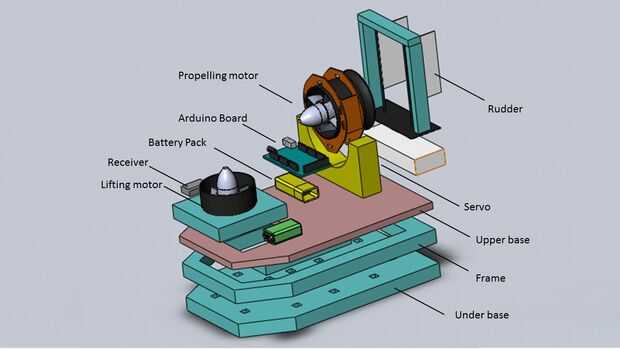
El diagrama anterior muestra el diseño de nuestro hovercraft.
El sistema de control principal de nuestro hovercraft es una placa arduino Arduino Mega 2560, que puede recibir y enviar señales por el programa que escribimos para ella. Un mando de seis canales es nuestro controlador para el controlador. Desde el control remoto de seis canal puede enviar señales digitales continuas, el conductor puede controlar el aerodeslizador perfectamente con funcionamiento continuo.
Utilizamos un motor de cepillo para proporcionar el ventilador de elevación para nuestro hovercraft. Cuando el motor funciona, el flujo de aire primero infle la bolsa de gas a través de los orificios alrededor de la base bajo el aerodeslizador. Después de rellena la bolsa de gas, flujo de aire sale de lo hovercraft a través del centro agujereado en la debajo de la base. Cuando el flujo de aire, golpeó el suelo y da un impulso recto para el piso bajo la base en lugar de la herida gasbag, que hace el aerodeslizador muy estable. Cuando el flujo de aire de la bolsa de gas, el flujo entre la bolsa de gas y el suelo hace la fricción más bien pequeño para que el aerodeslizador puede funcionar en una velocidad muy alta. También este diseño resuelve el problema de uno mismo-spinning desde nuestra bolsa de gas se cierra.
Un servo con timones conectados y un motor sin escobillas proporcionan la propulsión y la capacidad de cambiar de dirección. El motor se fija en la base superior del aerodeslizador. Los timones se fijan detrás de él. Cuando los timones cambian su posición, el flujo de aire golpee los timones y les da un impulso que causa el aerodeslizador conectado con el timón para cambiar su dirección. Este dispositivo es bastante sensible para cambiar el sentido y fácil de controlar los grados pasamos por el control sobre el timón.
Desde nuestro control remoto es capaz de proporcionar tres canales de señales digitales continuadas, podemos controlar el servo, el ventilador de elevación y el motor de propulsión al mismo tiempo. Que podemos disminuir la velocidad del ventilador de elevación cuando vamos sobre terreno liso y aumentarla cuando se ejecuta en la superficie áspera. De esta manera, somos capaces de enfrentar desafíos posibles en el torneo.
")



")

")

 by Micrazysoft")




