Paso 3: Diseño del circuito
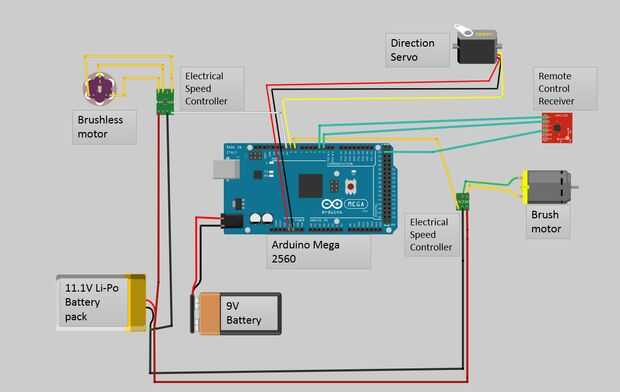
El diagrama anterior muestra nuestro circuito.
Utilizamos una batería de 9 V fuente de alimentación para la placa Arduino y el servo y el receptor conectado a él. (La placa arduino puede ajustar el voltaje a 5 V automáticamente.) Utilizamos un paquete V Li-Po 11,1 para suministrar la energía para los dos motores.
El motor del cepillo que funciona como el ventilador de elevación y el motor sin escobillas que proporciona la propulsión está conectados a un controlador de velocidad eléctrico. Los reguladores eléctricos están conectados a los pines PMW en la placa Arduino. Cuando damos el servo digital de la señal entre 0 y 180, puede cambiar su posición de 180 grados. Cuando damos a los motores una señal digital entre 1000 y 2000, puede trabajar entre su menor potencia y mayor poder. Preste atención, el aumento de la velocidad puede no ser lineal, que se debe consideración al programar.
Está conectado el receptor, que recibe las señales de tres canales en el control remoto, con tres pernos de la placa Arduino. Prestar atención, puesto que la función de transferencia de las señales es una interrupción de uno, debemos conectar el receptor a las clavijas de int en la placa Arduino. Para Arduino Mega 2560, elegimos Pin 2, Pin 3 y Pin 22 como los pernos por esta parte. (Información precisa para esto puede ser referido en la página web oficial de Arduino). Cuando el controlador se mueve el eje de balancín del mando, podemos obtener una señal digital entre 1000 y 2000 del receptor.
El voltaje de la batería empaquetado debe ser mayor que 11 V para trabajar correctamente los componentes electrónicos. Para el 11.1V batería, el voltaje de seguridad es de 12,6 V y no cargarlo con demasiada frecuencia, que puede causar daños irreparables de la batería.
")



")

")

 by Micrazysoft")




