


Verano 2014
Introducción a la ingeniería de competición
Proyecto 1: aerodeslizador
Vg100
Profesores: Shane Johnson
Andrew Yang
Asistentes de enseñanza: Alien Dong
Frank Xu
Jackie Zhang
Equipo de Prometheus
Miembros del equipo: Christopher Yuan, 5133709024,
Gu Nan, 5133709166
Chen Yutian, 5133709264
Yichao Yang, 5133709211
Ye Chu'nan, 5133709271
08 de julio de 2014
INTRODUCCIÓN
Cuadro 1: La puerta del oeste de la Universidad de Shanghái Jiao Tong
Instituto de la Universidad de Michigan Shanghai Jiao Tong University articulación, o abreviado comúnmente a JI, es un proyecto de colaboración entre las administraciones de la escuela entre China y los Estados Unidos con el fin de promover el crecimiento mutuo y para cultivar la próxima generación de ingeniería de la mente para el beneficio de ambos países. JI se encuentra actualmente en el campus de Minhang de Shanghai Jiaotong University en Shanghai, China.
Descripción de la competencia
Pista
Obstáculo
Línea de salida 1
Línea de salida 2
Línea de llegada
Figura 1: vista 3D de nuestra pista de carreras
El camino del tiempo, el torneo y amistoso se llevaron a cabo en el laboratorio en el 4to piso en edificio de JI. Cada equipo demostró su excelente trabajo en sus aerodeslizadores únicos. Figura 1 demostró nuestra pista de carreras. En la contrarreloj, el equipo más rápido utiliza sólo 11 segundos para terminar un bucle en comparación con el equipo más lento con 2 minutos y 48 segundos. En el torneo, aunque dos contra equipos más o menos conoció la situación accidental como siendo pegado por los obstáculos, manipuladores intentaron su mejor aerodeslizador hasta la línea de llegada. En el partido amistoso, varios equipos mejoraron sus aerodeslizadores durante la noche y uno de ellos incluso derrotó al ganador del torneo. Público ovacionó cada vez un aerodeslizador se apresuraron a través de la línea de llegada.
Reglas con viñetas
● Registrar y ha aerodeslizador inspeccionados uno por uno antes de la competencia.
● Terminar un lazo todo en contrarreloj dentro de 3 minutos para obtener el grado completo.
● Sólo TA puede tocar y mover el aerodeslizador si es necesario durante la carrera.
● no ejecute un acceso directo a través de los bordes interiores marcados con cinta roja.
● no chocar con el otro aerodeslizador deliberadamente durante el torneo, de lo contrario usted será descalificado.
Nuestro logro
Nuestro equipo utiliza 28 segundos en la contrarreloj y a los ocho finales en el torneo.
Normas de competencia con viñetas
Fuente de alimentación ●: no más de 12V cada batería
Especificaciones del Motor ●: no más de 12V
Peso Total ●: no más de 800 gramos
Tamaño Total ●: no más de 30 * 30 * 30 (cm * cm * cm)
● Circuito de Control Central: serie de Arduino
Requisitos de la función ●: flotando sobre el suelo 2cm; ser controlado por cualquier forma de control remoto; reducir la fuerza de fricción con cualquier método mecánico; ser capaces de correr, cambiar de dirección y parada.
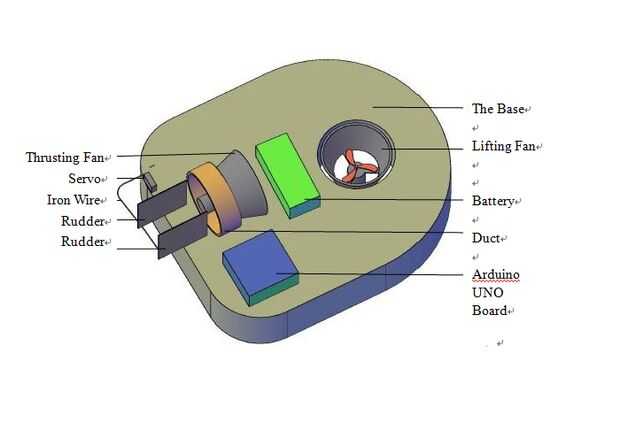
Nuestro Hovercraft
Empujando ventilador
Servo
Alambre de hierro
Timón de dirección
Timón de dirección
La Base de
Ventilador de elevación
Batería
Conducto
Tablero de Arduino UNO
Figura 2: La colocación de todos los componentes en el aerodeslizador
Nuestro hovercraft consistió en 6 partes principales, el marco principal, circuito, motor de elevación, motor de empuje, timones y servo y conjunto potencia. El marco principal se hace de cubierta con nylon a prueba de agua para proporcionar lugar para componentes y falda de aire la espuma de EPE. El motor de elevación y el empuje motor se colocaron verticalmente y horizontalmente para proporcionar fuerza de elevación y empuje de la fuerza. Se combinaron con conducto especialmente diseñado para permitir una mayor fuerza. Los timones pueden convertir su dirección controlada por un servo a través del alambre de hierro adjuntarlos juntos. El circuito consistió en Arduino board, dos reguladores y un módulo inalámbrico. Pueden recibir la señal de wifi desde el más alejado y luego controlar los motores y el timón a través de controladores de velocidad y servo. El conjunto potencia de 1200mh puede proporcionar energía suficiente para todos estos componentes con sólo una batería.
LISTA DE MATERIALES
Figura no.
Precio
Artículo
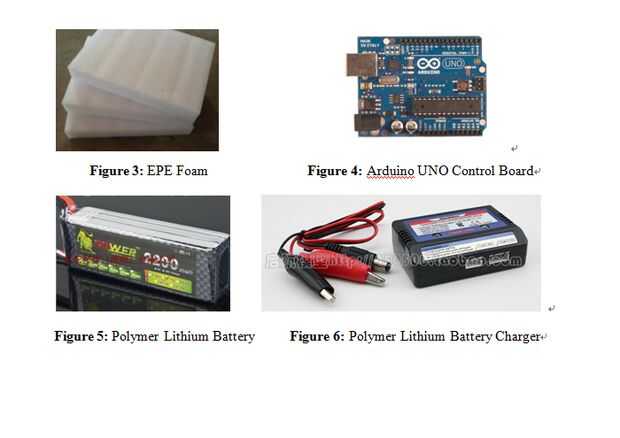
3
39 RMB (﹩6.40 USD)
Espuma de EPE * 10 (30 cm * 40 cm * 3 cm)
4
58 RMB(﹩9.50USD)
Tablero de Control de Arduino UNO
5
80 RMB(﹩13.11USD)
Batería de litio polímero
(11.1V 2200mA; 30 C; Fabricante de León)
6
38 RMB(﹩6.23USD)
Cargador de batería de litio polímero
(para 7.4V-11.1V baterías; Fabricante de Linkman)
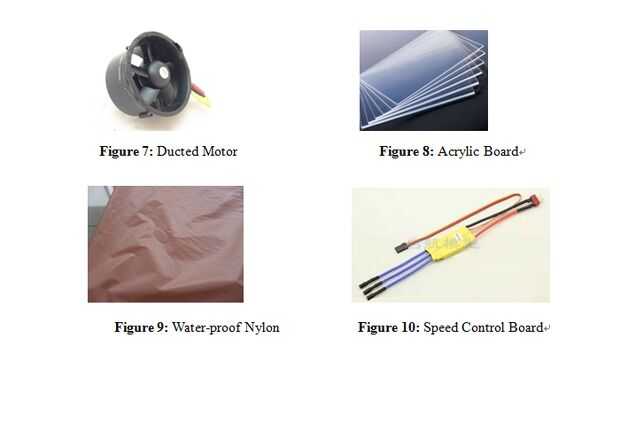
7
175 RMB(﹩28.69USD)
Conductos de Motor * 2
(Modelo: QF2611-4500; Fabricante QX-MOTOR)
8
11 RMB(﹩1.80USD)
Tablero de acrílico * 1 (30 cm * 40 cm * 1. 5 mm)
9
9.6 RMB(﹩1.57USD)
Nylon impermeable (0,8 m * 1,5 m)
10
66 RMB(﹩10.82USD)
Tablero de Control de velocidad * 2
(30A; Fabricante de Da(XXD) Xi Xin)
11
32 RMB(﹩5.25USD)
Tieline con enchufe * 4
12
RMB(﹩0.82USD) 5
Cinta para ductos
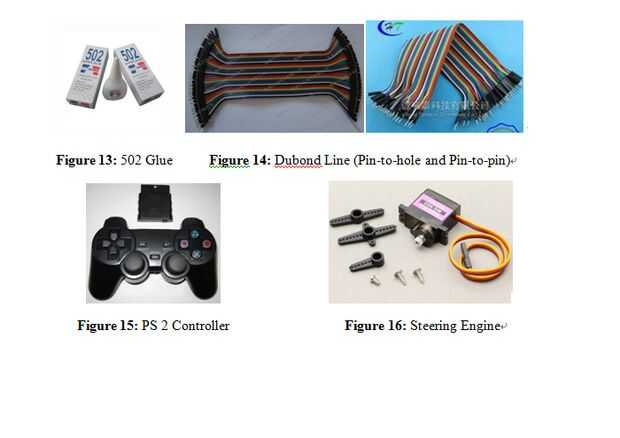
13
RMB(﹩0.82USD) 5
Pegamento 502
14
18 RMB(﹩2.95USD)
Línea Dubond
(Pin a pin * 40; Pin-to-Hole * 40)
15
70 RMB(﹩11.48USD)
PS 2 controlador
(Xiao Huo Ban fabricante de E-mall)
16
20 RMB(﹩3.28USD)
Motor de dirección
(Modelo: MG90S; Fabricante de Shen Hui)
17
RMB(﹩0.82USD) 5
Tablero de madera (30 cm * 40 cm * 2 m m)
18
20 RMB(﹩3.28USD)
Cinta plástica de
19
30 RMB(﹩4.92USD)
Tarjeta de expansión de Arduino UNO
20
1 RMB(﹩0.16USD)
Clips de
21
RMB(﹩0.82USD) 5
Cuerda de cáñamo
Figura 3: Figura 4 de la espuma de EPE: tablero de Control de Arduino UNO
Figura 5: Polímero litio batería Figura 6: cargador de batería de litio polímero
Figura 7: Conductos Motor Figura 8: tablero de acrílico
Figura 9: Nylon impermeable Figura 10: tablero de Control de velocidad
Figura 11: Tieline con enchufe figura 12: cinta aislante
Figura 13: 502 pegamento figura 14: línea Dubond (agujero de alfiler y Pin a pin)
Figura 15: PS 2 controlador Figura 16: volante motor
Figura 17: Tabla de madera figura 18: cinta plástica de
Figura 19: Expansión de Arduino UNO tablero figura 20: Clips
Figura 21: Cuerda de cáñamo
")











