Paso 5: Cableado - Servos y poder
En este paso se necesita el controlador mago MICRO, el micro USB adaptador de junta con los pernos del cabezal, el cable plano y tu bot de pie. Se suelda y caliente pegado en este paso tener esas herramientas listas.
El Banco de potencia Powerbot viene con un USB corto cable micro del USB. Para cargar la batería el micro USB está conectado en la ranura de carga de la batería y el USB va al cargador de pared. Se vuelva a utilizar este cable para alimentar el ICBob. Salida de la batería es a través del USB así que nos conectamos a través de la micro tarjeta de adaptador USB a conseguir el poder para el bot.
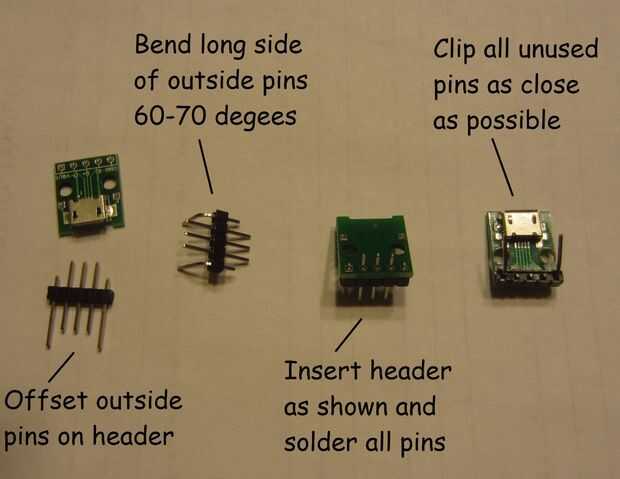
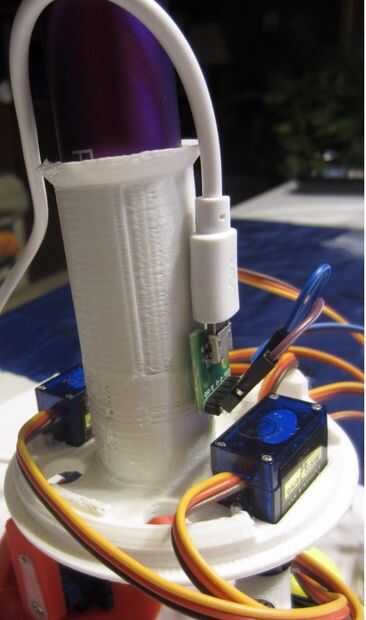
Primero permite obtener el adaptador montado. Se refieren a la foto para los próximos pasos. Sólo utilizas los 2 fuera pernos (gnd y V +) para el bot. Deslice con cuidado el 2 fuera de pins en el encabezado para que el lado corto sobresale aproximadamente 3/16 pulg. Con alicates doblar los 2 largos pasadores 60 grados más o menos. De la curva antes de soldar las placas son frágiles. Insertar encabezado como se muestra y todos los pines en la parte posterior para la fuerza de la soldadura. Clip todos los pines no utilizados lo más cortos posible frente y la espalda. Antes de que pegue el adaptador al cañón Conecte el micro cable USB para que acaben con la suficiente separación. Puso un gran pegote de pegamento caliente en la parte posterior del adaptador y colocarlo en la posición mostrada en el barril. Espera hasta que endurezca.
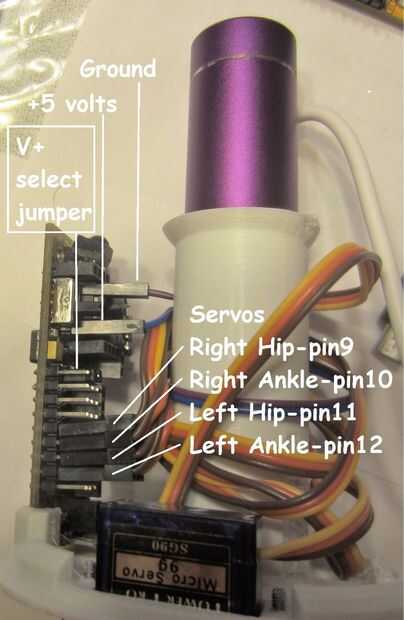
A continuación conecte los conectores de 4 servo al controlador. Nos gusta el MICRO mago ya que tiene los conectores de 3 pines a bordo para el cableado fácil servo. El cable de color más oscuro (marrón?) va hacia el borde del tablero. Los bocetos de Arduino incluye utilizan las siguientes clavijas.
- Cadera derecha (RH) - pin 9
- Tobillo derecho (RA) - pin 10
- Cadera izquierda (LH) - pin 11
- Tobillo izquierdo (LA) - pin 12
Para la potencia de conexión a la Junta salga un par de cables desde el cable plano. Más de este cable plano utilizas para el cableado del sonar. Conecte un extremo del par en el micro adaptador USB. El pin que está más cercano al frente del bot es tierra y el otro V +. El otro extremo se conecta al controlador cerca del interruptor. El V + cable conecta con el conector con la etiqueta 'Batería en' en la documentación. Conectar el cable de tierra al pin 'gnd' un poco por encima la 'batería IN'.
Importante! -Hay un jumper de selección V + sobre el conjunto de pin D1. Este puente tiene que ser en el juego interior de pernos o los servos no funcionará.
Finalmente Limpie la ranura del controlador de la base para que el controlador tiene un ajuste ceñido. Puede conectar la batería y cambiar en el controlador para asegurarse de que acciona para arriba.













