Paso 3: impBot: esquema e iniciación
Para consejos y trucos en soldar los orificios plateada de la placa breakout, pines macho y estirones de la soldadura, revisa la controlBox instructable. Para mantener las cosas en movimiento, no voy a ir a lo largo del procedimiento en la misma profundidad de soldadura.
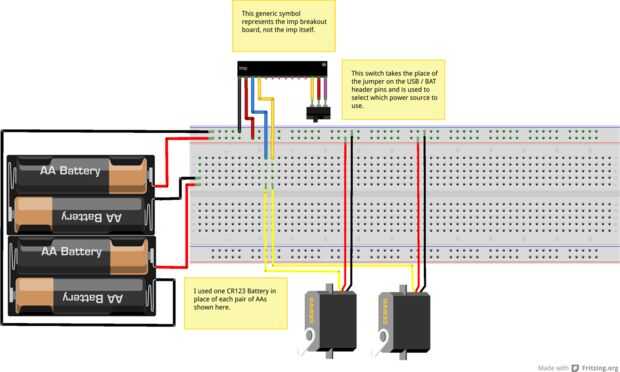
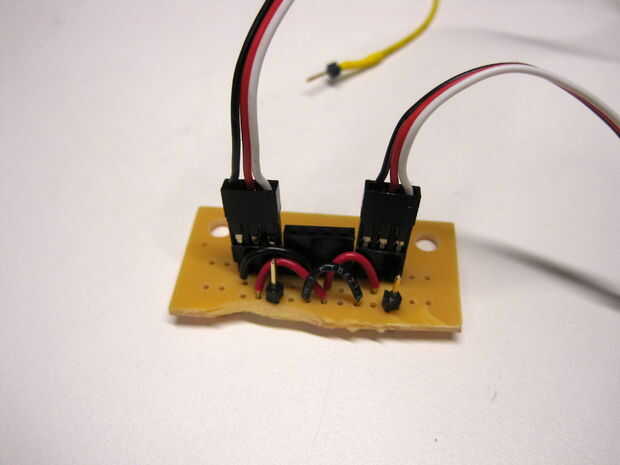
Los servos ya cuentan con cabeceras de zócalo femenino, por lo que podemos evitar para soldar completamente por sólo poner algunos encabezados pines macho en el perfboard. También he añadido que un par de cable conduce a mi breakout Junta para Vin y GND, que conectado a pins macho. Colocar un enchufe hembra de 4 pines en el perfboard (sólo necesitaba dos pasadores, pero fueron el más pequeño tenía cuatro pines zócalos).
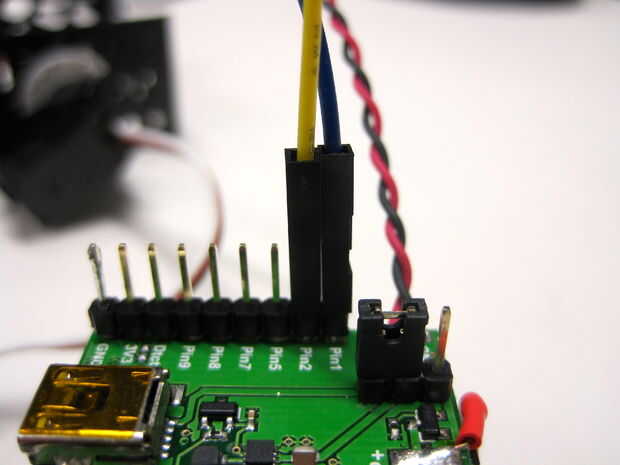
También me ha pasado de tener pines macho en la board breakout ya, por lo que era capaz de usar prueba conduce con solo-perno enchufes hembra en ambos extremos para conectar las señales PWM en el tablero de arranque con el conector apropiado en mi perfboard de esa manera.
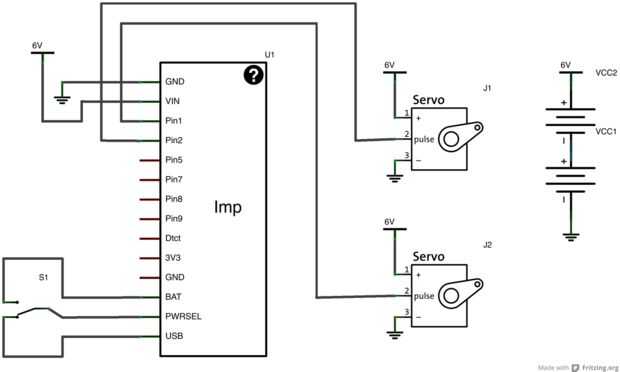
Sin exceso el punto adicional: usted puede conectar las líneas sin embargo prefiere. La forma más fácil, si vas a empezar con los tableros pelados, es probablemente sólo ejecutar un cable de la placa breakout a la Junta de rendimiento para cada uno de:
- Energía (Vin, 6V)
- Tierra
- Pin 1 (la señal PWM para el motor de la cacerola)
- Pin 2 (la señal PWM para el motor de inclinación)
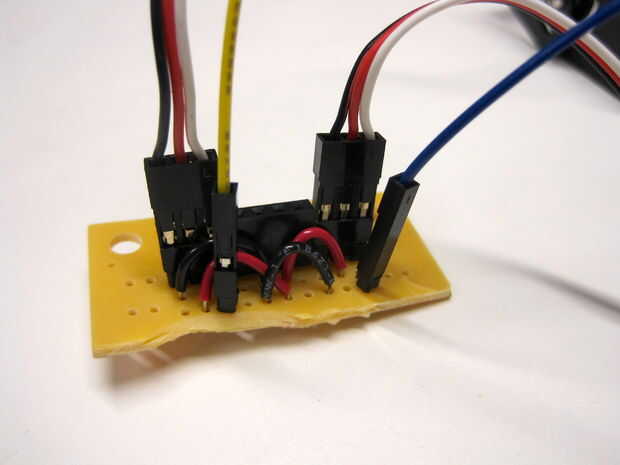
Montar el circuito del motor:
- La soldadura de dos tres pines macho encabezados para su perfboard
- Usar pequeños trozos de cable para conectar el medio de cada uno a la fuente de 6V de la placa breakout
- Utilice la misma técnica para conectar la clavija correcta de cada tres pines a masa en la placa breakout.
- Puede ejecutar la señal PWM para cada motor directamente con el conector restante de cada cabecera de breakout Junta.
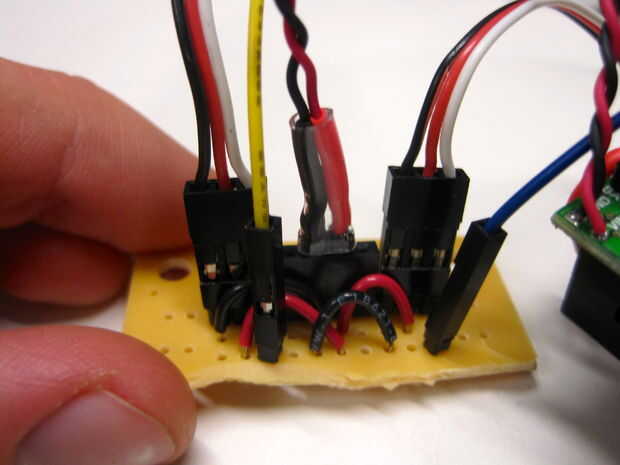
Esa es la parte funcional de este proyecto! Si desea un interruptor de encendido para tu robot, se puede Agregar también:
- Soldadura una 4" a 6" pedazo de cable con el conector del centro de la cabecera de tres pines utilizado para elegir la potencia USB o la batería en su tabla de breakout de imp. Si no hay ningún encabezado de la placa breakout, puede soldar ese cable justo en el orificio plateado en el centro.
- De la soldadura de otros dos 4" a 6" pedazos de cable para las conexiones USB y BAT
- Conecte estos tres cables al conmutador de palanca:
- El cable de la patilla central (o agujero de centro) debe conectarse a la patilla central del interruptor de palanca
- Los dos restantes los cables van a las dos clavijas exteriores del interruptor - que lado es que no importa.
- Como siempre, recomiendo usar del encogimiento del calor en estas conexiones para mantener las cosas ordenadas.
¡ Pruébelo! Un robot! Bueno, tiempo para poner este proyecto en el recinto.




")








