Paso 4: en la caja de
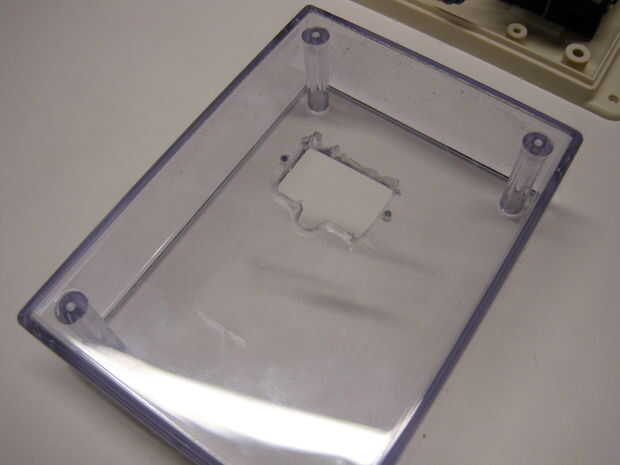

Naturalmente, te recomiendo que compruebe las dimensiones de tu servo y medir los cortes que vas a hacer en consecuencia, pero que he proporcionado un rápido esquema de las dimensiones que utilicé para mi servo A0090. Las dimensiones indicadas son los valores de medición del cuerpo del servo Corté de éstos. Además de hacer un recorte para el cuerpo de mi servo, hice una muesca para el cable para el servo de inclinación. Cortar la ranura lo suficientemente grande que algunos cableado adicional se ajuste cómodamente; el objetivo es que el robot sea capaz de sostener algo como una luz o una cámara o un palito de malvavisco asado o cualquiera que sea el caso.
Nota: recomiendo taladrar los orificios de montaje para el servo antes de hacer el corte de cuerpo del servo con la dremel. La parte superior de la caja es más fuerte sin un agujero grande en él, y hará que el taladro trabajar más fácil y más precisa. Mejor aún; no hay peligro del ejercicio camina al borde de la abertura y soplar a través de la pared entre el orificio de montaje y el recorte si no han hecho el recorte aún. Punzón los agujeros antes de perforar para la exactitud y del taladro de 1/8".
Recomiendo usar un taladro para perforar las cuatro esquinas del rectángulo antes de cortar a lo largo de los bordes con una dremel. Con un disco abrasivo, es muy difícil entrar en las esquinas sin pasarse y hacer marcas antiestéticas. Por la perforación de las esquinas, darle los puntos finales de dremel para cortar líneas entre. Esto también parece ayudar a reducir la cantidad de plástico fundido soplado hacia atrás en el corte de la rueda de corte. Trate de empezar con un orificio de 1/8" en cada esquina.
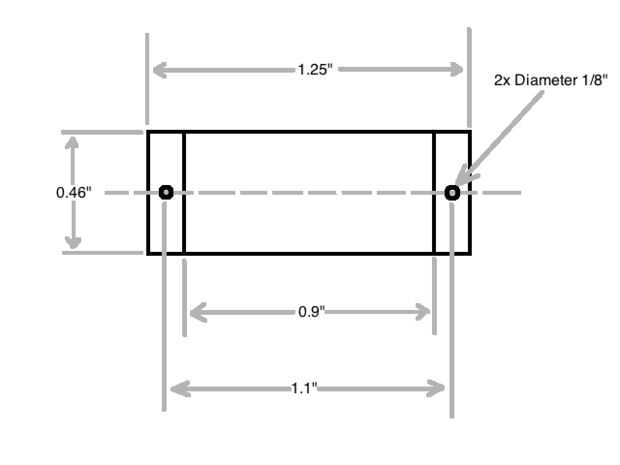
Una vez que tienes el recorte en el recinto, puede soltar el servo del pan en el corte y asegúrelo. Puede que necesite quitar el soporte de la cacerola/la inclinación desde la parte superior de la bandeja de servo para obtener en los tornillos de montaje.
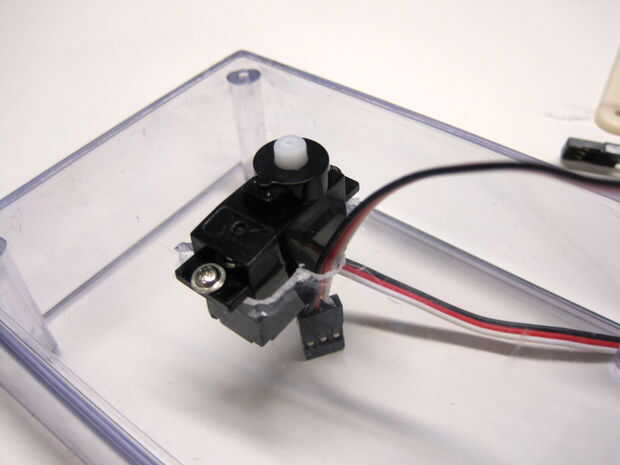
Mientras trabaja en el gabinete, ahora es un buen momento para hacer un agujero para el interruptor, si se añade uno. El interruptor que utiliza requiere un agujero de 3/16" en el recinto. Punzón, taladro con la broca de 1/8" en primer lugar, luego terminar con el taladro de 3/16". Si usted tiene un montón de fresas alrededor del agujero, puede limpiar con papel de lija, un cuchillo x-acto, o (mi favorito personal) suavemente puede desbarbar los orificios con una herramienta de avellanado. Retire la tuerca hexagonal del eje del interruptor, el interruptor de alimentación a través del orificio y fije con la tuerca apretando suavemente con un una pequeña llave de tuercas ajustable.
Alimente el cable para el servo tilt a través de la ranura en la tapa, seguro de los cabezales servo con los pernos de la placa dentro de la caja. Baje la tapa en su recinto y asegúrelo.
Bien, vamos a añadir un poco de código para hacer tu robot controlable.




")








