Paso 5: El código fuente de: firmware de tu robot

Para agarrar el código fuente, diríjase a https://github.com/tombrew/ei-fw-tom/blob/master/april-dualServo.nut. Copie el código a su portapapeles, y luego diríjase a plan.electricimp.com y Regístrate en el planificador. Ahora sigue estos pasos:
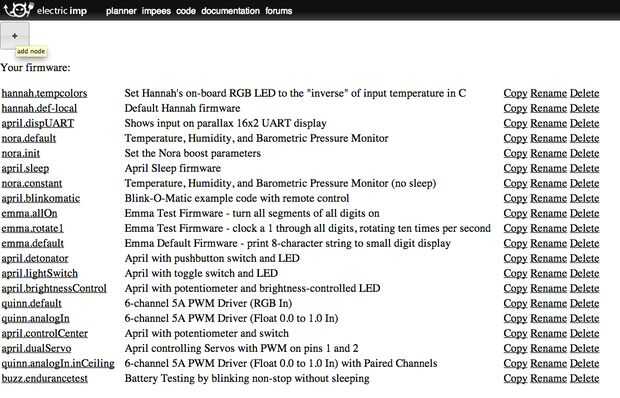
- Haga clic en la pestaña "código" en la parte superior de la ventana de planificador en su navegador
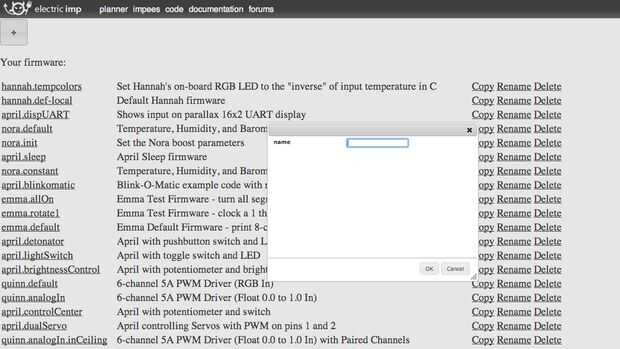
- Haga clic en el botón en la parte superior de la ventana de código "+"
- Dar su nuevo firmware un nombre. Utilicé "april.dualServo", como nuestro diseño de tablero de arranque se llama "Abril"
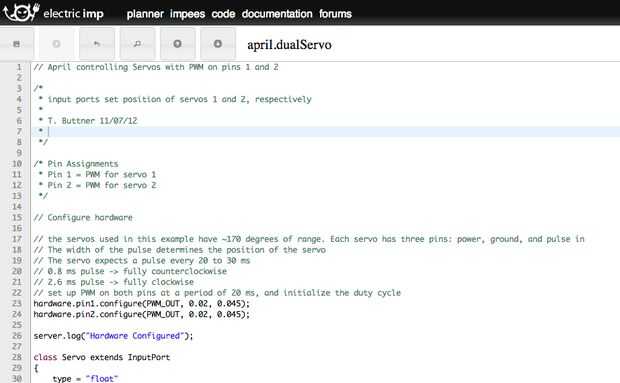
- Pegue el código en github en el IDE que aparece
- Haga clic en guardar botón en la parte superior izquierda de la ventana IDE
- Haga clic en el botón de "plan" en la parte superior izquierda para volver a la vista de planificador de la
Allí! Ahora solo necesitamos decirle a tu robot para ejecutar este código. Siga estos pasos:
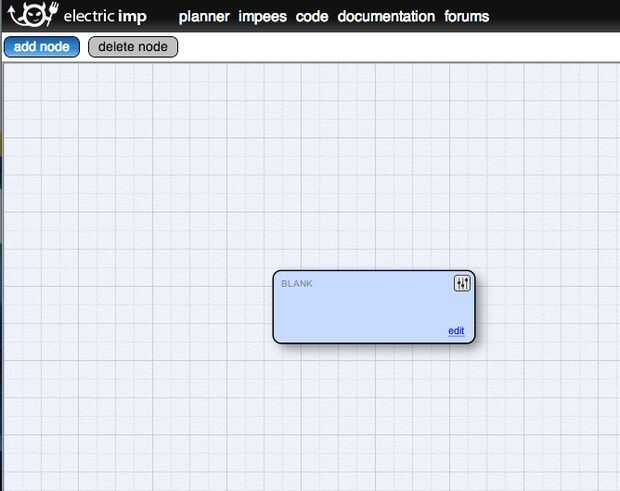
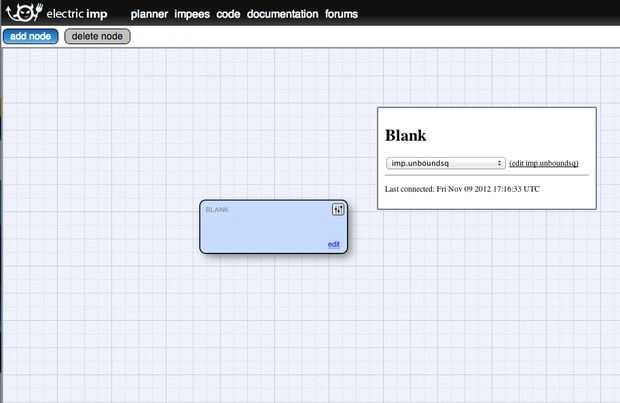
- Parpadear hasta tu impBot hacer tu red wifi. Aparece un cuadro azul en su plan. Si no parpadeó por un imp en su breakout junta antes, el cuadro azul a decir "En blanco", como el imp servicio no tiene ningún firmware para ejecutar en el tablero hasta que asigne uno.
- Haga clic en el botón de configuración (una cajita con una foto de algunos deslizadores en él) en la esquina superior derecha de la caja azul que representa el impBot
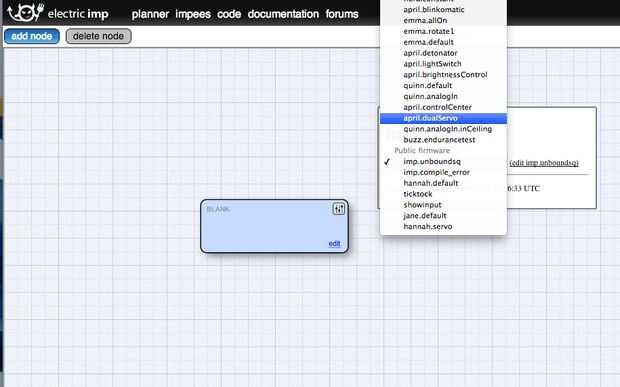
- En el cuadro emergente que aparece, haga clic en el menú desplegable para mostrar todo el firmware que tienes disponibles en este imp
- Seleccionar el firmware creado por pegar código en github
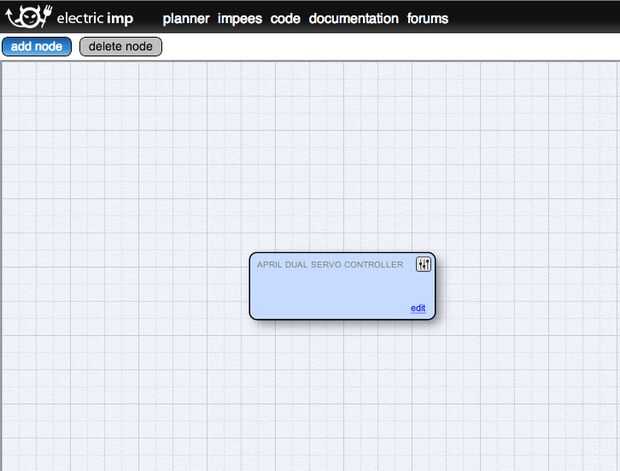
- El imp se empezará a ejecutar el código en pocos segundos. Las palabras "Controlador de SERVO doble abril" aparecerá en el cuadro azul una vez que el imp está configurado.
Voila! Tienes un robot controlado por el imp, que coche de cualquier lugar del mundo como tienes internet. Intente conectar uno de los nodos "TIC/TAC" en el planificador y ver lo que sucede, o conectar el robot a un potenciómetro de entrada como yo lo hice en el video de intro. Tratar de conectar un HTTP en nodo para enviar valores a tu robot, y puede incluso escribir una rápida aplicación móvil para controlar tu robot con su teléfono o tableta - desde cualquier lugar!




")








