Paso 2: El vínculo
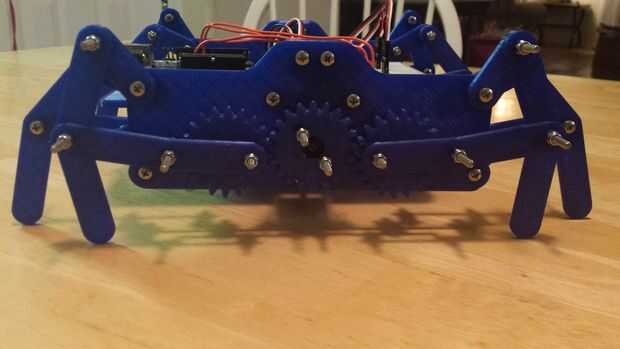
El acoplamiento en este robot es conocido como el acoplamiento de Klann creado por Joe Klann, usted puede encontrar muchísima información sobre su vinculación en http://www.mechanicalspider.com. Me presentaron a la vinculación de Klann por uno de mis mentores en la mejor competencia de robótica (revisa su propio robot utilizando este enlace aquí) y desde entonces ha demostrado para ser demasiado compleja para hacer con nuestros materiales limitados y tiempo hemos podido usar en nuestro robot. Decidí después de la competición que sería tratar de hacer mi propio robot utilizando este enlace.
Hice algunas investigaciones más sobre cómo crear mi propio. Pero también encontré que no había mucho de las instrucciones o modelos pre-hechos para un robot hacer usted mismo. Así que pensé por qué no hacer uno y dar las instrucciones para quien quiere hacer uno.
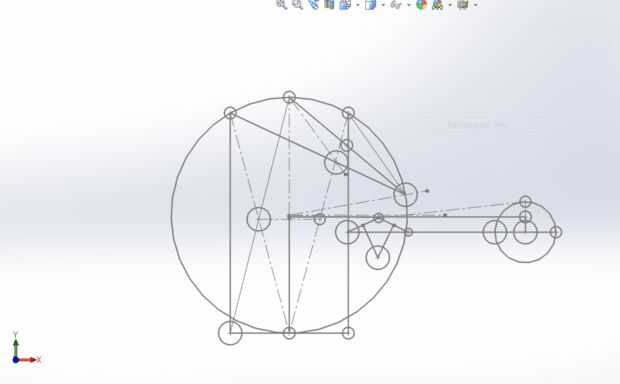
La vinculación es totalmente customizeable y puede diseñarse en cualquier 2D dibujo herramienta con el texto activar aquí. No recomendaría diseñar uno a mano en papel si la vinculación va a ser a pequeña escala, ya que algunos de los puntos pueden muy juntas.
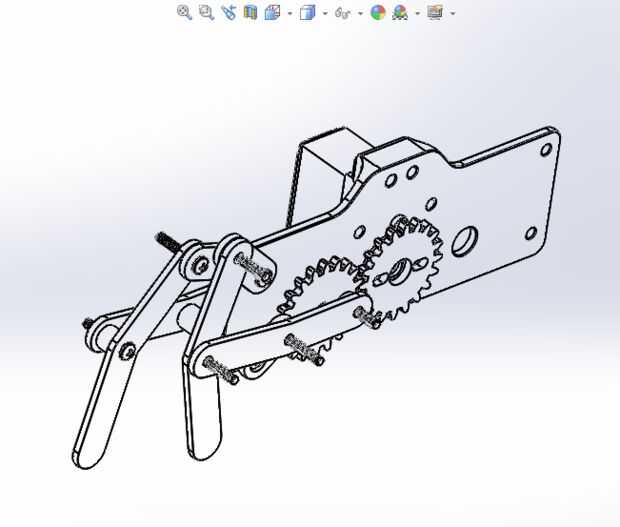
He creado mi vinculación en Solidworks y Unidos son los modelos 3D de cada pieza si quieres personalizar a sus propias necesidades.








")
")



