Paso 3: Asamblea delantera
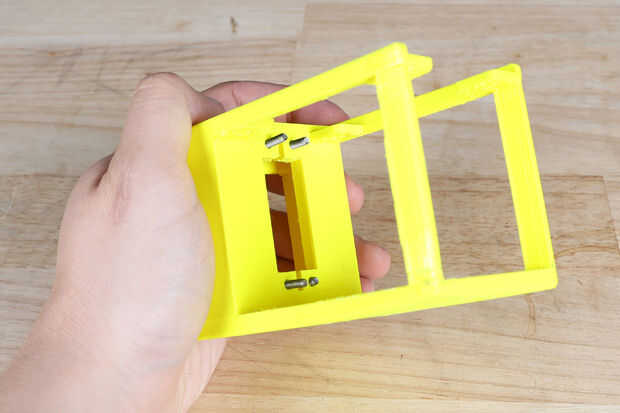


Inserte cuatro tornillos en la parte delantera del robot.
Deslice los dos engranajes de la pata delantera en el compartimento en la parte delantera del cuerpo del robot que los enchufes de patas apuntando hacia el exterior.
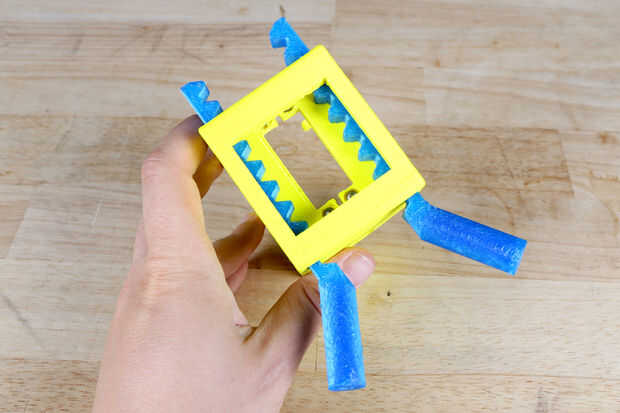
Lugar el engranaje entre el dos rack marchas de las piernas.
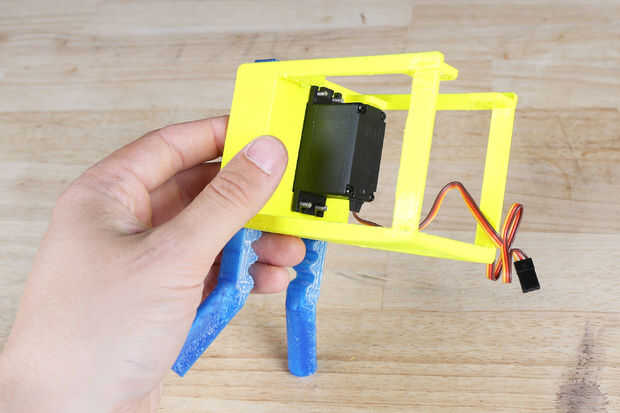
Unidad de servo cagado en el zócalo en la marcha del centro de prensa y utilizar un tornillo para fijar esto en su lugar.
Por último, perno el servo con los pernos instalados anteriormente para completar la Asamblea delantera.


")



")






