Paso 9: Robóticas precedentes
Prototipo de araña hidráulico (2011)
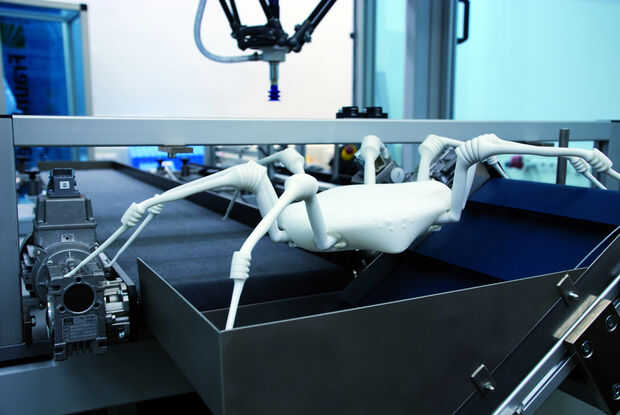
Fraunhofer IPA
La araña robótica que foto arriba está construida por Fraunhofer. A diferencia de otras arañas robóticas, éste refleja biomecánica de araña real mediante el uso de empalmes hidráulicos. Estas juntas son controladas por una bomba a bordo, las válvulas y las unidades de control. También es de interés, porque con una impresión 3D SLS proceso (similar en formas para el proceso de impresión de Objet). La cantidad de control y fuerza de que cada pierna es capaz de aplicarlo permite pisar terreno irregular con gran agilidad. Por desgracia, hay documentación limitada actualmente publicado y no video demostrando sus capacidades.
Robot autónomo de araña caminando (2008)
Kanal Von Tinowerner
Pros: Es un mecanismo muy simple y algo convincente como una araña.
Contras: Las piernas están rígidas y el movimiento es rígido.
Brazo de Shadow Robot Company con mano C5 (2008)
Shadow Robot Company
Pros: Es muy complejo y basados en la neumática. Usando presión de aire, es capaz de mucha fuerza.
Contras: El movimiento es muy mecánica y rígida.
Brazo de Robot blando músculo Artificial y pinza (2012)
mikey77
Pros: Como un brazo, no es ideal. Sin embargo, como un posible modelo para un tentáculo con ningún esqueleto rígido, este es un enfoque muy interesante.
Contras: Que carece de estructura y control complejo necesario para el movimiento del brazo.
Tentáculo robot (2006)
Christopher Glenn
Pros: Es un tentáculo de fuerte neumática aire-músculo base capaz de una gama de movimientos.
Desventajas: Es grande y difícil de manejar, tiene un limitado número de puntos de flexión y aparentemente limitado por la gravedad.
Tentáculo Robot suave (2011)
El proyecto de pulpo
Pros: Se ve y aparentemente actúa como un tentáculo real.
Contras: sospecho que es un esqueleto rígido sólo capaz de un pivote de una deformación y capitalizando en la tendencia de la cubierta del silicón líquido y envolver las cosas cuando se mueve bajo el agua.
 (impresión 3D)")












")