Paso 10: Errores intencionales


Desde el inicio, reconocí mecánicamente no era el enfoque correcto. Para empezar, no podría ampliar y estirar como un tentáculo real. También sólo se permite para la deformación a lo largo de dos ejes y - en el que - sólo a lo largo de un eje singular. Esto es menos que ideal porque un tentáculo real permite deformaciones en cualquier dirección en cualquier punto dado a lo largo de su longitud. También es rígido y no particularmente adecuado para agarrar cosas.
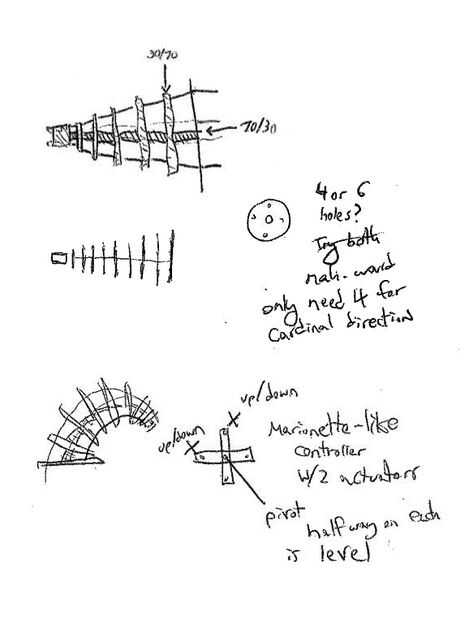
La cola es accionada por cuatro cables metálicos pasados a través de cuatro filas consecutivas de agujeros en cada uno de los discos. Estas filas están dispuestas en posiciones cardinales compás alrededor del centro. Si tira de un cable, se dobla la cola en esa dirección, y si tira del cable opuesto, entonces tirará en el otro. Tirando alternativamente cables diferentes, la cola se puede hacer doblar en cualquier dirección.
Sin embargo, quería tener de primera mano experiencia para entender por qué este particular tentacle-como la configuración no era correcta. Necesitaba interactuar físicamente con ella antes de que realmente pude entender por qué fue un error. También quería ver si había algo de valor que podrá encontrar en su diseño. Después de cierta experimentación inicial llegué a la conclusión que a pesar de sus defectos, es, después de todo, bastante cerca de lo que estaba tratando de hacer.
Este diseño, en definitiva, siente dificultad para mímico un tentáculo. Sin embargo, este mecanismo inspirado más adelante enfoques hacia las articulaciones de bisagra. También creo que tal vez algún valor en este diseño de robots tentáculo en tierra; pero más sobre esto más adelante.
 (impresión 3D)")












")