Paso 41: Conseguir un lugar
A pesar de que la primera prueba de que el robot se levante contra la gravedad resultó vana, comencé a sospechar que usando los nuevos controles de motor TIP120 iba a funcionar mucho mejor.
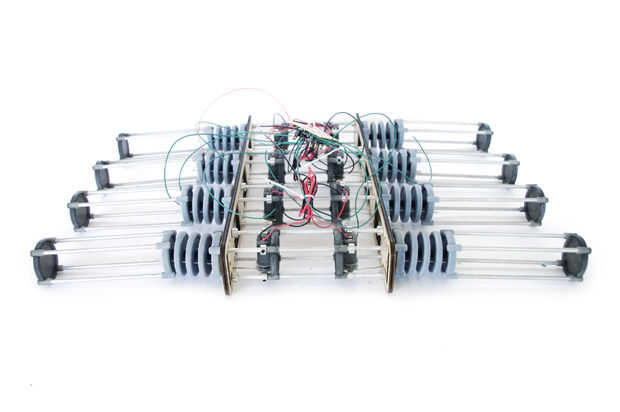
He quitado las gomas y potencia de los motores que utilizan directamente el transistor TIP120. Cuando todos los motores eran a la vez, el robot fue capaz de levantar a sí mismo de la tierra:
Esto era prometedor porque demostró que el robot no podría levantar solamente sí mismo, sino también que las juntas tenían suficiente torsión para mover.
La próxima prueba que probé fue alimentar las piernas alternando los juegos (dos en cada lado). Esto no fueron excepcionalmente bien. El robot tiende a levantar sí mismo de un lado, y la torsión en las piernas del otro lado hacía la curva tales que no pudo hacer mucho de nada:
A continuación he decidido para las piernas en forma secuencial en pares. Este tipo de trabajo:
Finalmente, decidí hacer el robot de la tierra cuando primera vez que todas las patas obtener tensión. Desde este punto, dejó intentar mover sistemas alternos de piernas. Este fue el que más tengo que ponerlo a caminar de la manera indicada:
Como se puede saber desde el final del video, se rompió después de este plazo de prueba. Tener los motores tire contra el marco rígido que se mueve no desgarraron agujero del huso. Se estaba convirtiendo en claro que este proceso de impresión 3D no era adecuado para el tipo de la robótica que tenía en mente y esto parecía tan bueno de una presa cualquiera.
 (impresión 3D)")












")