Paso 7: La pata de araña
Juntas más de la araña están controladas por músculos extensor y flexor tradicional. Sin embargo, sólo dos de las articulaciones con la presencia de los músculos flexores. Regular la presión en las articulaciones y músculos para tirar contra ellos, la araña es capaz de generar fuerza substancial. Estas juntas también tienen propiedades mecánicas reversibles, lo que significa que las articulaciones no sólo pueden endurecer para proporcionar la ayuda, pero también pueden ayudar en la creación de un marco para las deformaciones de la curva en múltiples direcciones. Este uso del músculo para crear un marco estructural es similar a la manera en que funcionan los tentáculos cefalópodos.
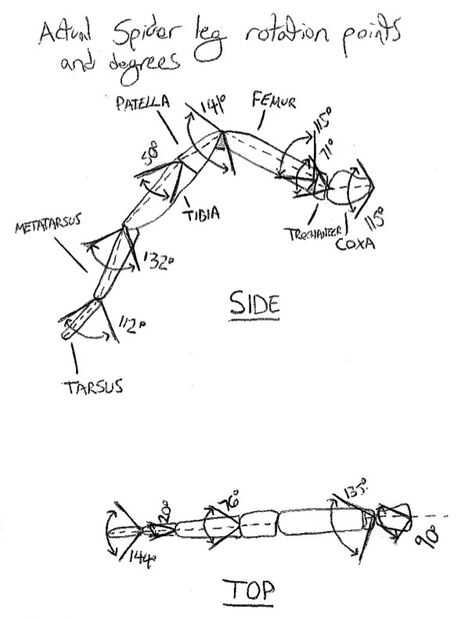
Aunque mi guesstimation inicial fue que la pierna de una araña consistió en 5 segmentos, me sorprendió saber que en realidad tiene 7 segmentos discretos. Además, cada segmento tiene un único y gran rango de movimiento. Esto hace que la pata de araña mucho más robusto de previsto inicialmente.
En cuanto al tipo de articulaciones que conforman su pierna - aparte de las dos articulaciones parcialmente hidráulicas - la estructura no es muy notable. Las articulaciones de la araña consisten enteramente en empalmes de bisagra, como el encontrado en el codo humano. Sin embargo, lo que les distingue de las articulaciones humanas es la capacidad para un número de ellos significativamente la curva a lo largo de 2 ejes.
De esta investigación básica, ha quedado claro que para imitar correctamente pata de la araña, el robot va a necesitar mucho heckuva segmentos y actuadores. Alternativamente, si el objetivo no es imitar perfectamente a una araña, sino construir una articulación modular, entonces no parecerá muy diferente de la articulación del codo humano. Dicho esto, me parecio muy interesante las articulaciones parcialmente hidráulicas para futuras investigaciones. Gran parte de mi investigación temprana girado en torno a la tentativa de crear empalmes de bisagra que incluía elementos hidráulicos.
 (impresión 3D)")












")