Paso 8: Software
Software fue desarrollado en dos partes, una interior de placa Arduino y otra parte dentro de PC bajo windows. Código de Arduino también tiene dos partes, inicializar y lazo. Inicializar el mover los tres deslizadores a su casa Coloque y luego mover el extremo caliente a cero punto. En bucle de sección placa Arduino espera comandos de puerto serie y los ejecuta que envía pulsos para controladores de motor paso a paso para mover sliders y extrusora en dirección positiva o negativa.
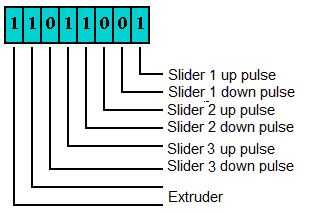
Parte de la PC de nuestro código consiste en varias secciones, interpretación de Gcode, cinemática inversa del mecanismo de delta y cálculos del comando. Después de preparar Gcode cada parte impresión por Repetier debemos interpretarlos y extraer coordenadas de extremo caliente y el movimiento de extrusión. Debemos configurar muchos parámetros como capa cociente grueso y relleno interior Repetier para que coincida con las especificaciones de la impresora 3D. Después de la extracción de coordenadas utilizamos una función que calcula la posición de cada control deslizante basado en XYZ requiere del extremo caliente. Utiliza a relación de cinemática inversa delta mecanismo basado en parámetros como la posición de longitud y montaje de brazo paralelo de deslizadores. Última parte de nuestro código calcula comandos necesarios mover los deslizadores y basado en coordenadas del extremo caliente de la extrusora. Comando es un byte que muestra pulsos necesarios en dirección positiva y negativa como se muestra en la figura. Código fuente de la placa Arduino es también aquí "zpulsecwextr2.ino".
La función que calcula los movimientos de cursor de XYZ de hotend es "xyztoslideZ123.m". Está escrito en la octava y se puede ejecutar en entorno Octave o Matlab. XE es la posición del efector final puntos de enganche y XS es la posición de puntos de fijación en deslizadores.




")




")

