Paso 15: El Software
Hay 2 firmware principal para las rampas.
-Merlin
-Sprinter
Usé el software Merlin porque las impresiones un han visto donde mejor hecho con Merlin que con Sprinter.
Descargado de: https://github.com/ErikZalm/Marlin
Actualmente estoy usando 14.01 de Cura para la creación de la gCode.
Arduino utiliza la gcode para colocar su cabeza de impresora y saca,
y mucho más por supuesto.
su posible imprimir directamente desde el PC con el cable USB conectado al Arduino.
Alterar la en configuración cargar el software de Arduino que necesita un poco de software.
usted necesitará Arduino 0.23 para el mejor resultado.
Ver archivo "arduino-0023.zip"
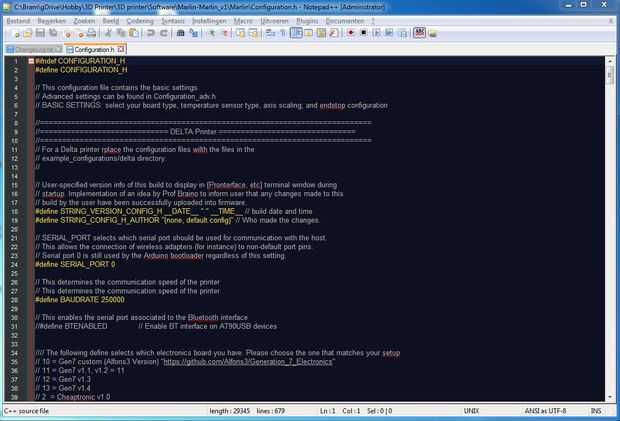
Después de instalar el software de extraer el firmware de Merlin y abra el archivo "Marlin.PDE".
Ir a la página de "Configuration.h".
Esto es donde están todos los ajustes.
Pasarán a través de esto, paso a paso.
Sólo voy a mostrar la configuración básica.
Hay mucho más en esta configuración.
El número de fila y los valores son desde el archivo de configuración por defecto.
En el archivo zip agregado encontrarás los archivos personalizados y por defecto
Nº de fila: #define 73 Motherboard, Tarjeta madre 7
Esto establece la electrónica tipo tablero.
valor predeterminado es 7 (Ultiemaker)
Pero para este proyecto utilicé un 1.4 de rampas
con una extrusora, un ventilador y una cama de cabeza
usé nr 33
Nº de fila: 77 / / #define CUSTOM_MENDEL_NAME "Bestia de Bram"
sólo por diversión, he nombrado mi impresora, esto se muestra en la pantalla LCD en el arranque.
Fila 84: #define ESTIRADORES 1
Este sistema el número de extrusoras de que la impresora tiene.
por defecto es 1
Nº de fila: 124/127 TEMP_SENSOR
La extrusora y cabeza de la cama tienen un termistor conectado.
Esto para medir la temperatura.
es importante obtener el valor correcto, de lo contrario el estirador de la cama se sobrecalentamiento o permanecer frío.
Si sabes que termistor se utiliza lo único que necesita completar el número correcto.
-#define TEMP_SENSOR_0 es el termistor estirador principal
-#define TEMP_SENSOR_BED es el termistor de cama caliente
Si sólo se utilizan 2 termistores, usted puede llenar en 0 en las otras 2 filas
Por encima de la fila nr 124 es lista de termistores utilizados.
Si no está seguro sobre el tipo de termistor está utilizando,
descargar al cheat de datos el termistor.
conectar el termistor a un polímetro y medir su resistencia,
comprobar la temperatura. Y cruzar referencia a esto con la tabla en la hoja de datos.
Nº de fila: #define 234 PREVENT_DANGEROUS_EXTRUDE
Esto sirve para evitar que la extrusora se mueva cuando el extremo caliente es frío.
Te comento esta salida para propósitos de la prueba.
Nº de fila: 301 / 306 #define verdadero INVERT_X_DIR
Estas filas se utilizan para definir el sentido de giro de motor.
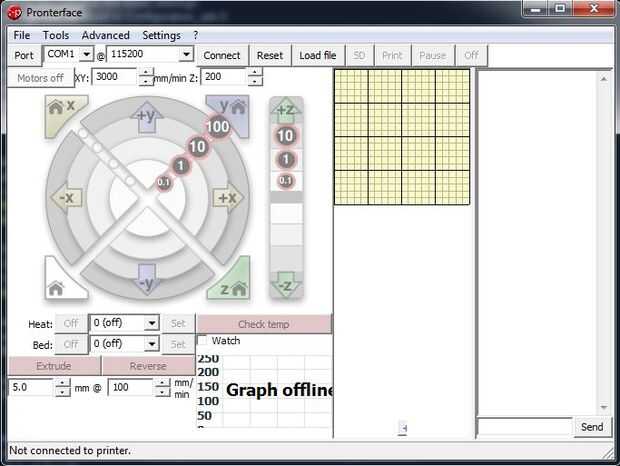
Después de un conectado todos al final se detiene y steppers a alimentado la impresora,
conectado a la PC y utiliza "tirada".
Tirada le permite imprimir, pero también se mueve el eje.
Me mudé el axsis 10mm y confirmd el tured steppers la manera correcta.
Si no: cambie true a False en el eje, guarde el archivo y subirlo otra vez.
(si los steppers no se ejecutan correctamente, vaya al paso siguiente primero)
Nº de fila: 313 / 319 #define X_MAX_POS 205
Esto establece los límites máximo y mínimo de la impresora.
El valor mínimo de 0 no debe ser cambios (excepto es que desea tendrá punto de inicio en el centro de la cama)
El valor máximo es fácil de averiguar.
Casa impresora y utiliza la tirada o la pantalla para mover la cabeza.
Mueva el eje justo antes de que la cabeza de la cama con hojas.
Revisar la distancia transitada y esta en el firmware.
(si los steppers no se ejecutan correctamente, vaya al paso siguiente primero)
Nº de fila: #define 403 DEFAULT_AXIS_STEPS_PER_UNIT
Esta es la parte más difícil de la instalación.
Aquí es disuasión cuánto el motor tiene que activar para el 1 paso.
1 paso == 1mm
He utilizado la th
para obtener los valores para el eje X, Y y Z.
Ir al sitio de un relleno en las varaibles.
Los pasos por defecto:
{78.7402, 78.7402, 200.0 * 8/3, 760 * 1.1}
78.7402 = AXIS_STEPS_PER_UNIT_X,
78.7402 = AXIS_STEPS_PER_UNIT_Y,
200.0 * 8/3 = AXIS_STEPS_PER_UNIT_Z,
760 * 1.1 = AXIS_STEPS_PER_UNIT_E
Esto de las mercancías de los valores que he utilizado:
{53,33 53,33 2560.00, 515.91}
Para probar esto,
-Guardar el código.
-Subir a Arduino.
-Iniciar la tirada.
-Casa el axsis.
-Medir la distancia de un punto fijo a un punto que se va a mover,
por ejemplo el portador del eje X.
-Anotar el valor medido.
-Mover un eje 50mm.
-Mide la distancia otra vez y anótela.
-calcular la distancia recorrida por la impresora.
-Si su igual a 50mm se mudó en el software: ¡ Felicidades, este eje está configurado correctamente.
Ir al siguiente eje.
-Si no: Utilice la fórmula siguiente para calcular el siguiente valor para tratar de:
(Valor / valor real movido * 100) = nuevo valor;
por ejemplo: (53,33 / 55 * 100) = 96.96
Establecer el valor y vuelva a intentarlo!
He utilizado la página web para calcular los valores, y trabajar de inmediato.
la extrusora fue otra historia.
para que funcione:
-Colocar un trozo de filamento en el extrusor y fijarlo con la abrazadera hacia abajo.
NO PONGA DEMASIADO LEJOS HACIA ABAJO EL FILAMENTO.
solo pegan 2 cm o menos. Tiene que mover hacia abajo 2 cm.
-Pegar un trozo de cinta sobre el filamento.
-Medir la distancia desde la cinta a la extrusora.
-Bajar la extrusora 1 o 2 cm. (con tirada).
-Mide la distancia otra vez y calcular la distancia transitada.
-Si su igual a la distancia dada, gran. Si no es así, utilice la fórmula sobre una prueba otra vez!
(si está conectado un LCD)
De la fila nr: 470.
Elimine el código para el LCD pantalla u utilizado.
El resto del código bien, puede leer a su través para ajustar o establecer algunos otros valores.
pero estos son los valores necesarios para establecerse.




")


")
!")





")