Paso 4: Es hora de un pequeño código.
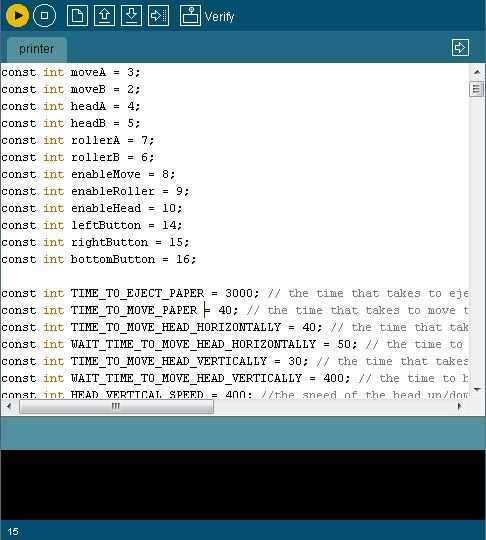
const int moveA = 3; Pin 1 del motor para mover la cabeza horizontalmente
const int moveB = 2; Pin 2 del motor al mover la cabeza horizontalmente
cabezal int const = 4; Pin 1 del motor para mover la cabeza verticalmente
const int PLU = 5; Pin 2 del motor para mover la cabeza verticalmente
const int rollerA = 7; Pin 1 del motor para mover el rodillo
const int rollerB = 6; Pin 2 del motor para mover el rodillo
const int enableMove = 8; para permitir que el motor que mueve la cabeza horizontalmente
const int enableRoller = 9; para permitir que el motor que mueve el rodillo
const int enableHead = 10; para permitir que el motor que mueve la cabeza verticalmente
const int leftButton = 14; el interruptor izquierdo
const int rightButton = 15; el derecho de cambiar
const int bottomButton = 16; el interruptor de la parte inferior
Ahora en setup() hay que configurar los pines de control del motor como salida y las patillas de los interruptores como entrada (a) , entonces tiene que ajustar las clavijas permiten tan alto (b) y habilitar las resistencias pull-up de los interruptores de los pernos (c) .
(a) establecer la salida de los pines de entrada
pinMode (moveA, salida);
pinMode (moveB, salida);
pinMode (cabezal, salida);
pinMode (PLU, salida);
pinMode (rollerA, salida);
pinMode (rollerB, salida);
pinMode (enableMove, salida);
pinMode (enableRoller, salida);
pinMode (enableHead, salida);
pinMode (leftButton, entrada);
pinMode (rightButton, entrada);
pinMode (bottomButton, entrada);
(b) establecer las clavijas permiten
digitalWrite (enableMove, HIGH);
digitalWrite (enableRoller, HIGH);
analogWrite (enableHead, HEAD_VERTICAL_SPEED);
Tenga en cuenta que motor de la cabeza vertical está habilitado a través de analogWrite, que porque este motor era súper rápido y no tiene marchas, por lo tanto, con el analogWrite con un valor de cerca de 400 que el motor se comporta correctamente. Puede utilizar el valor adecuado de mos (entre 0 y 1023) para su motor.
(c) habilitar las resistencias pull-up
digitalWrite (leftButton, HIGH); resistencia de pullup de //enable a este pin
digitalWrite (rightButton, HIGH); resistencia de pullup de //enable a este pin
digitalWrite (bottomButton, HIGH);
Ahora debemos tener una tabla de ASCII glifo, Afortunadamente podemos conseguirlo aquí: http://www.arduino.cc/playground/Code/PCD8544
Si usted quiere dibujar e imprimir tú propio glifo puede hacerlo aquí: http://www.carlos-rodrigues.com/projects/pcd8544/ luego simplemente pegar el glifo generado en el código e imprimir que.
Los algoritmos para el control de la impresora son bastante sencillo y se puede descargar el código fuente completo al final de este instructivo.
")


")




 basados en Arduino")


")

