Paso 6: Hacer inalámbrico!




Ver detalles de pernos RevIO a
Sólo tiene que enchufar el breakout Junta en cargas el bosquejo y juegos!
¿Qué es el bosquejo tiene?
RevIO o Arduino está supervisando los pines analógicos conectados FSRs. siempre Haz Pulsa el FSR, transmite el comando inalámbricamente vía transmisor XBee (conectado a Arduino) al módulo de receptor de XBee conectado al PC.
Y el programa de proceso en el ordenador traducirá el comando y tocar el tambor sonido por consiguiente.
Siguiente es un Arduino Sketch, cargar el sketch en Arduino. (ya incluido en los archivos del zip en el siguiente paso, FSRControl.ina)
Nota: El módulo XBee o XBee Breakout board deban ser retirado mientras se carga el sketch Arduino o RevIO.
Porque los pines TX y RX en Adaptador FTDI para subir sketch comparten el mismo pines TX y RX del módulo XBee.
/*
FSRControl.ino
*/
mínima lectura de los sensores que genera una nota
const int umbral = 25;
int pinA0 = 0;
pinA1 int = 1;
pinA2 int = 2;
pinA3 int = 3;
Static const int avgCount = 4;
int valFSR1, valFSR2, valFSR3, valFSR4 = 0;
int matriz1 [avgCount];
int arr2 [avgCount];
int arr3 [avgCount];
arr4 int [avgCount];
int i;
Índice de int = 0;
Promedio de los valores de las matrices promedio
avg() vacío
{
valFSR1 = valFSR2 = valFSR3 = valFSR4 = 0;
para (i = 0; i < avgCount; i ++)
{
valFSR1 += matriz1 [i];
valFSR2 += arr2 [i];
valFSR3 += arr3 [i];
valFSR4 += arr4 [i];
}
valFSR1 = avgCount;
valFSR2 = avgCount;
valFSR3 = avgCount;
valFSR4 = avgCount;
}
void setup() {}
reajuste de matrices de promedio
para (i = 0; i < avgCount; i ++)
{
matriz1 [i] = 0;
arr2 [i] = 0;
arr3 [i] = 0;
arr4 [i] = 0;
}
índice = 0;
iniciar el puerto serie a 9600 bps:
Serial.Begin(9600);
}
void loop() {}
los valores reales en las matrices promedio
matriz1 [índice] = analogRead(pinA0);
arr2 [índice] = analogRead(pinA1);
arr3 [índice] = analogRead(pinA2);
arr4 [índice] = analogRead(pinA3);
Índice de incremento,
Si el índice supera los tamaños de la matriz a cero
Índice ++;
Si (Índice > = avgCount)
{
índice = 0;
}
calcular los valores promedio
AVG();
divide el valor por 4 para escalar hasta 0 - 255
FSR 1
Si ((valFSR1 / 4) > umbral) {}
Serial.Print (valFSR1/4, DEC); Serial.Print (",");
Serial.Write('1');
}
FSR 2
else if ((valFSR2 / 4) > umbral) {}
Serial.Print (valFSR2/4, DEC); Serial.Print (",");
Serial.Write('2');
}
FSR 3
else if ((valFSR3 / 4) > umbral) {}
Serial.Print (valFSR3/4, DEC); Serial.Print (",");
Serial.Write('3');
}
FSR 4
else if ((valFSR4 / 4) > umbral) {}
Serial.Print (valFSR4 4, DEC); Serial.println();
Serial.Write('4');
}
Else {}
Serial.Write('0');
}
Delay(100);
}
XBee Wireless
Para comunicarse sin cables entre el PC y Arduino, necesitamos dos módulos XBee y un cable FTDI. Se conectará un módulo XBee para Arduino sin cable FTDI.
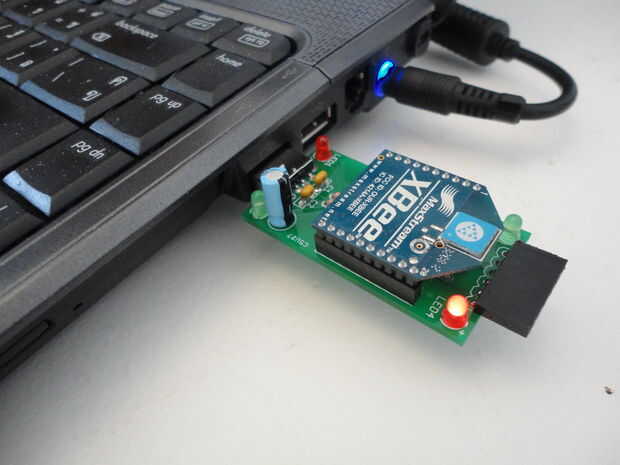
El segundo módulo XBee se conectará al PC o portátil mediante cable FTDI (o xBee Buddy).
Tomaría mucho espacio y el tiempo para explicar la instalación, configuración y prueba el módulo XBee. En su lugar proporciono los enlaces que se podrían utilizar como punto de partida sobre cómo trabajar con los módulos XBee.
Aquí están mis tutoriales de XBee de WIKI, se muestra cómo configurar y probar el módulo XBee mediante Hyperterminal y X-CTU:
Configurar XBee mediante comandos AT.
Configurar XBee utilizando el Software X-CTU.
Mi videotutorial XBee.




 inalámbrico (Edimax EW-7811Un)")








