Paso 2: Realizar ingeniería inversa del mando a distancia


La idea básica aquí es el mismo - pero en vez de dos botones de control de un solo canal (un encendido y un apagado), hay seis botones de control de tres canales (encender tres y tres). Cada uno de estos botones está conectado a un pin de un chip en la placa de circuito (rectángulo negro). Normalmente, estos pernos sentarse a 0V (una baja lógica). Cuando se presiona el botón correspondiente, el pin va hasta 5V (un lógico alto). Su objetivo final es "el truco" el mando a distancia a botones de pensamiento están siendo presionadas enviando una señal de 5V de un circuito controlado por el Raspberry Pi (más sobre esto más adelante). Para ello, necesitará averiguar qué pins en el chip están conectados a los pulsadores, así que usted puede soldar los cables de puente a ellos.
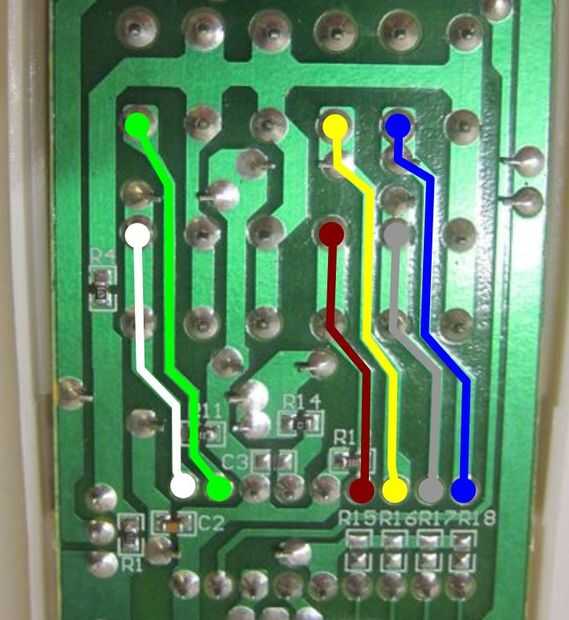
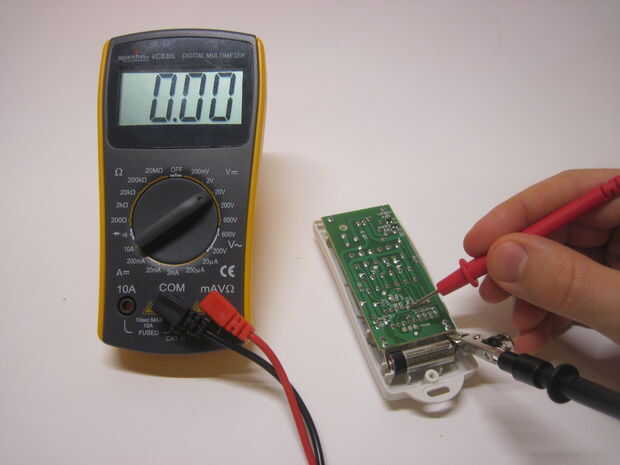
Hay dos formas complementarias de hacerlo. Uno es mirar las huellas en la parte posterior de la placa de circuito, figura cuáles conectar los botones a los pines en el chip. También puede comprobarlo con un polímetro comprobando para ver que pin cambia de 0V a 5V al pulsar cada botón (Asegúrese de que la batería está en, o que no funciona!). Este último puede ser un poco difícil hacerlo con las dos manos y es definitivamente más fácil si tienes los accesorios clip de cocodrilo para el multímetro.
Si usas los mismo remoto que relaciona de Amazon, podrá seguir exactamente mis diagramas. Si no es así, usted necesitará hacer algunos retoques en sus cuenta para averiguar que pernos de soldadura para en el siguiente paso.













