Paso 7: Crear el software de adquisición de datos del pelado-hueso - Parte1: el SPI
La adquisición de datos y la señal digital de señales son tareas críticas de tiempo, por lo que su aplicación debe hacerse en un sistema operativo en tiempo real o en un micro autómata fast controler. El primer método sería el uso de Linux con la distribución de Xenomai, mientras que el segundo enfoque estaría escribiendo un firmware para el micro controlador. Puesto que tenía más experiencia con hardware/firmware, he elegido el segundo método. Puesto que el procesador embebido de brazo tiene dos núcleos físicos, quería crear un firmware rápido a uno de los corazones y un sistema operativo al otro núcleo.
La primera cosa a hacer es la configuración del periférico SPI y el front-end analógico de ADS1299. El pripheral SPI se ha configurado como el ejemplo EEPROM sugerido en SDK, con algunas modificaciones menores:
El superior mencionó snipet moddified retrasar el reloj SPI por debajo de 1MHz. Para transmisión de datos se utilizó la función de transferencia polled.
La secuencia de configuración es como sigue: restablecer, STOP_DATA_TRANSMISSION, WRITE_DATA_REGISTERS, ENABLE_DATA_TRANSMISSION, START_ACQUISITION. Esta secuencia es cuando se configura el ADS1299, ya que después de reset, el IC automáticamente comienza a transmitir datos medidos y no guardar los cambios de registro. En la configuración he desactivado 5 canales (voy a utilizar sólo 3 + tierra), cambió la referencia a la común, la frecuencia de muestreo a 1kHz y ganar a 24.
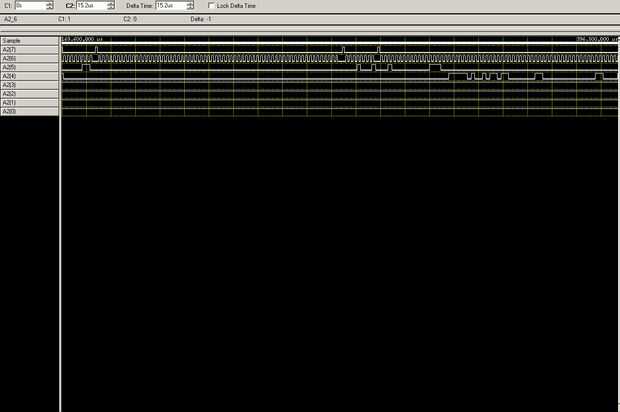
Con esta configuración de hecho, la única cosa a hacer es probar la comunicación, salvo algunos pequeños problemas: Si la batería está baja, pero la parte digital es powerered desde USB, es posible la comunicación en el campo, pero no funciona la adquisición. Otro problema podría ser ajuste de los parámetros SPI correctamente. Estos problemas pueden resolverse con la ayuda de un analizador de la lógica y el osciloscopio.

 de posiciones de Stick transmisor RC")




")




")

