Paso 3: Uso y calibración de los sensores
Ya que haya cargado en los archivos de encabezado apropiados, levantarse cada sensor y funcionamiento es relativamente simple. Crear una instancia de un puntero a cada clase de sensor utilizando el constructor. Después de crear las instancias, cada tipo de sensor IR básicamente tiene 1 función que importa (-> value(), > blackDetected(), etc.) y cada una de estas funciones devuelve un bool.
Estas salidas del sensor depende de la sensibilidad que debe ajustarse a sus necesidades. No se puede calibrar el sensor de movimiento pero el Sensor de distancia de infrarrojos y el Sensor reflectante de infrarrojos tienen potenciómetros para ajustar la sensibilidad.
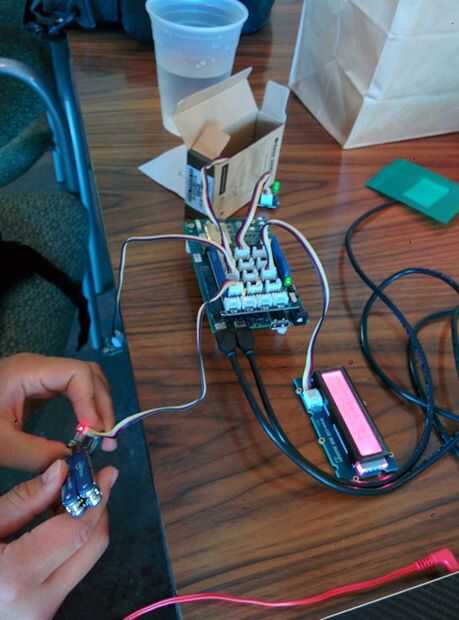
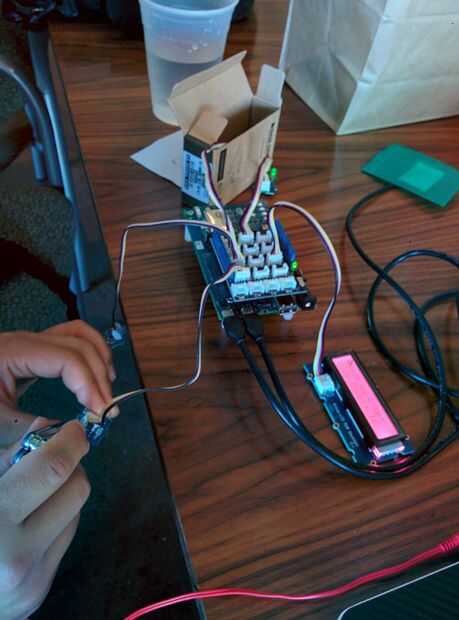
En la imagen, estoy calibrando el Sensor de distancia IR que pretende enviar un "verdadero" cuando detecta un objeto acercarse a o muy cerca del sensor. Con un destornillador, girando hacia la derecha lo hace más sensible y contra las agujas del reloj hace que sea menos sensible. Para este dispositivo, la recomendación es que mantenga el sensor sobre una superficie oscura, abierta y gire la perilla hasta que el LED se apaga solo.
El sensor reflectante de infrarrojos se utiliza tradicionalmente para la detección de primer plano por lo que debe ser calibrado en una mesa con una zona clara y oscura. Datos de calibración del sensor se pueden encontrar aquí http://www.seeedstudio.com/wiki/Grove_-_Infrared _...
He incluido algunos de mi código a la Junta de Intel Edison reaccionar a las entradas de los sensores.











")
 /w Arduino")
