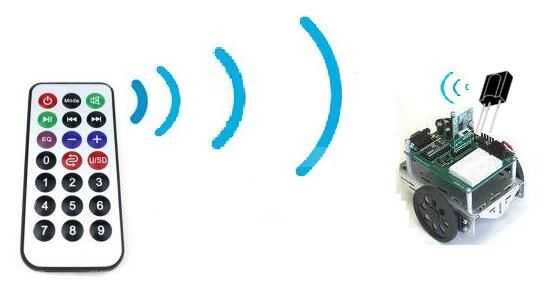
El presente proyecto describe un diseño e implementación de un infrarrojo (IR) remoto controlado RoboCar que puede ser utilizado para diversas aplicaciones de control sin tripulación automatizado. He diseñado RoboCar controlado remoto (movimiento de izquierda-derecha/adelante-atrás). Todo el sistema se basa en el microcontrolador (Atmega32) que hace el sistema de control inteligente y fácil de modificar para otras aplicaciones. Permite al usuario operar o controlar un RoboCar y operar el interruptor de corriente de unos 5 metros de distancia.
Palabras claves: decodificador IR, Microcontrolador AVR (Atmega32), TV mando a distancia, comunicación inalámbrica
__________________________________________________________________________


")





 TV remoto.")




