Paso 3: Control de Motor de DC con L293D
Motor de la C.C.
Un motor de corriente continua convierte energía eléctrica en energía mecánica que se puede utilizar para hacer muchos trabajos útiles. Puede producir movimiento mecánico como ir adelante/Backword de mi RoboCar. Motores de corriente continua viene en diferentes grados como 6V y 12V. Tiene dos cables o pernos. Podemos invertir el sentido de rotación mediante la inversión de la polaridad de entrada.
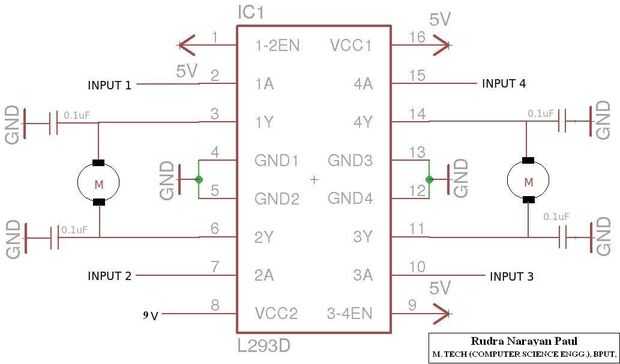
Aquí preferimos L293D como una calificación de 600mA es buena para manejar motores DC pequeños y diodos de protección están incluidos en el IC de sí mismo. La descripción de cada pin es el siguiente:
Permiten clavijas: son patillas Nº 1 y Nº 9. PIN no. 1 se utiliza para habilitar a controlador media H 1 y 2. (Puente en H en lado izquierdo). PIN n ° 9 se utiliza para habilitar el puente H controlador 3and 4. (Puente en H del lado derecho). El concepto es simple, si desea utilizar un puente H particular que hay que darle una lógica alta a pernos de enable correspondiente junto con la fuente de alimentación al IC. Este pin puede usarse para controlar la velocidad del motor utilizando la técnica PWM. VCC1 (Pin 16): pin de alimentación de energía. Conectar a la fuente de 5V. VCC2 (Pin 8): fuente de alimentación para el motor. Aplicar + voltaje ve que según la clasificación nominal del motor. Si usted desea conducir su motor a 12V, aplique 12V en este pin. También es posible accionamiento directamente en una batería, que no sea la que se utiliza para alimentar el circuito, sólo tiene que conectar + ve terminal de la batería al pin VCC2 y hacer tierra de las baterías comunes. (El voltaje máximo en este pin es 36V según su hoja de datos). GND (pines 4,5,12,13): Conecte a GND común del circuito. Entradas (pines 2,7,10,15): Son pines de entrada a través de que el control se dan señales por microcontroladores u otros circuitos/ICs. Por ejemplo, si en el pin 2 (entrada de 1 º conductor medio H) le damos lógica 1 (5V), obtendremos una tensión igual a VCC2 el correspondiente pin de salida de 1 º medio H controlador es decir pin Nº 3. Del mismo modo para la lógica 0 (0V) en el Pin 2, 0V en el Pin 3 aparece. Salidas (Pin 3,6,11,14): Salidas de pines. Según la señal de entrada señal de salida viene.
Movimientos motores A B
-------------------------------------------------------------------------------------------
Parada Baja baja
Hacia la derecha Baja alta
En sentido antihorario Alta baja
Parada Alta alta


")





 TV remoto.")




