Paso 16: Capítulo 14-cableado













Cableado de 1401 - piezas
- Electrónica:
- Arduino Mega
- Junta de rampas
- Cable de cinta del LCD x 2
1402 otras piezas instaladas durante el cableado
Para el montaje de printbed:
- Fichas de vidrio x 3
- Tornillos prisioneros M3x8 toma x 3
- Tuercas de la t-ranura de m3 x 3
Para el retractor Z-probe:
- Separador impreso
- M3x8 casquillo tornillo de cabeza x 1
- Tuerca de t-slot de m3 x 1
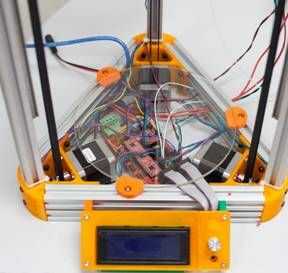
1403 el cableado caliente-final de la etapa 1
Ziptie los cables desde el efector en intervalos y ruta a las rampas del tablero en la parte inferior del marco.
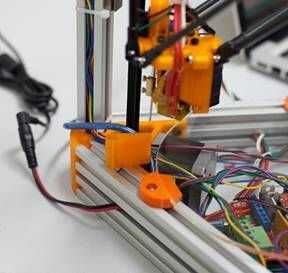
Las lengüetas de ajuste vidrio 1404 y retractor de la punta de prueba Z
Antes de enrutamiento el los cables del resto de la forma de la electrónica, usted necesita ajustar las lengüetas del soporte impreso para la printbed de vidrio y el retractor de la punta de prueba Z.
Soltar una tuerca de ranura en t de M3 en la extrusión de cada canal superior del armazón de la base.
Montar un M3 x 8 tornillo de cabeza plana a cada ficha de vidrio y ajustar las lengüetas como se muestra en la imagen. No apriete todavía.
Montar el retractor de la punta de prueba Z de la M3 x 8 tornillo de cabeza plana y una tuerca para ranura en t.
Coloque la tuerca en la protuberancia en el lado izquierdo del canal superior del armazón de la base de X-Y, deslice a lo largo hasta sus cerca de 40 m m de la torre Z. No apriete el tornillo, sin embargo, medir esto exactamente más adelante.
Cableado de 1405 caliente-final etapa 2
Ziptie el tope/hotend/estirador de cables en la base de la torre Z y división cables de los cables, ruteo el ventilador, cables Z sonda termistor y Z-tope a lo largo de la resistencia de canal y el motor y la hotend de Y-Z por el canal de X-Z - éstos pueden sólo ir tan lejos como el retractor de la punta de prueba Z. Ziptie y ruta en la base de la impresora.
Del mismo modo la ruta el cable Y tope a lo largo del canal Y-Z, el X-tope cable por el canal de X-Z y ziptie.
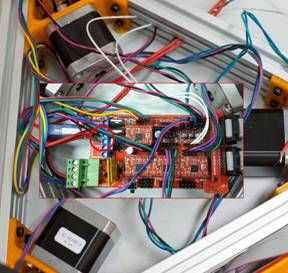
Instalación de electrónica de 1406
Asegúrese de que tomar precauciones para no acumular carga electrostática durante la manipulación de la electrónica - consulte Introducción para más detalles.
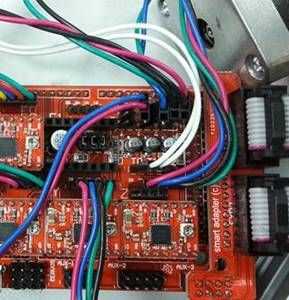
Cuidadosamente forma la 4 protectores de Motor en el X, zócalos Y, Z y E0 en las rampas. E1 zócalo permanece vacío. Asegúrese de que la carita de potenciómetro plata de conector de energía verde de las rampas! También asegúrese de que todos los pernos estén alineados correctamente con las tomas de rampas. Añadir las parrillas refrigerador si es necesario para el Motor ICs de escudo.
Ahora conecte las rampas con el Arduino Mega, comprobar que todos los pernos de acoplamiento estén alineados correctamente. Tenga en cuenta que los dos orificios de toma frontal izquierdos y derecho del Arduino quedan vacíos. Empuje hacia abajo firmemente y progresivamente para apoyarlo plenamente.
Atornille el cable de alimentación en las rampas. Tenga en cuenta la polarización! Cable rojo va en (+) y cable negro va al conector (-) de la Junta de rampas.
Conecte el cable USB en el conector USB en el Arduino Mega.
Cableado de motor de 1407
Colocar los cables del motor de la X, Y Z y motores de la extrusora, asegurando el partido correcto cables los pines derecha junto a la X, Y, Z y escudos E0. El cable rojo va en el perno 1B. Para el conector de Z, hay dos juegos de pernos; Use la externa, es decir, aquel que está más lejos de los escudos.
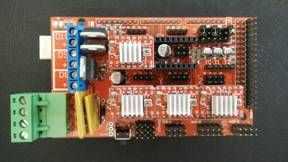
1408 rampas cableado
Trae todos los cables sueltos alrededor de la Junta de rampas.
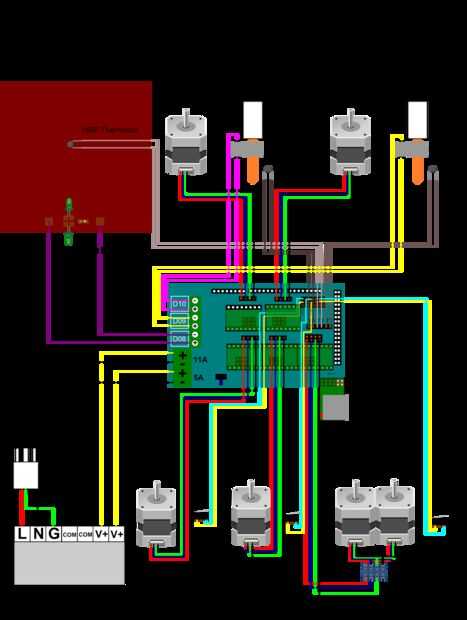
Nota: En caso de duda sobre el cableado, consulte las rampas oficiales instrucciones y enfrente de diagrama de cableado. El diagrama es de http://reprap.org/wiki/RAMPS_1.4#Pre-Flight_Check (haga clic en el diagrama de cableado en ese enlace para agrandar).
Tenga en cuenta que el diagrama es una impresora convencional, no un delta, así que muestra 2 x Z-motores. También se muestra a una segunda extrusora y una impresión caliente-cama - simplemente ignoran estos.
Conecte el ventilador del caliente-fin al conector D9 en las rampas. Compruebe la correcta polarización.
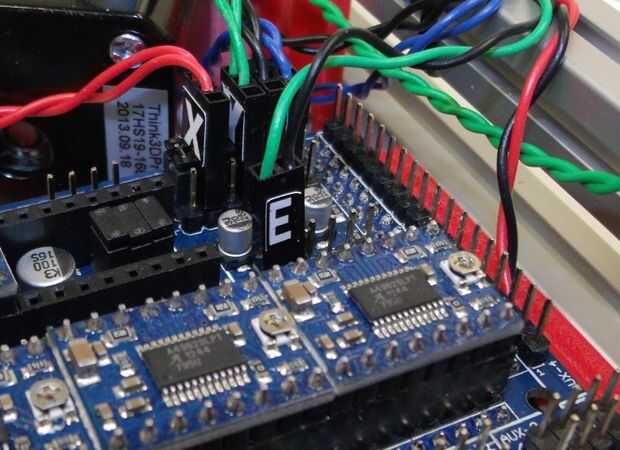
A continuación conecte los topes. La Junta de rampas tiene 6 cabeceras de tres pines etiquetados topes en la parte superior derecha de la pizarra al lado de la cabecera de I2C de 4 pines, que no se utiliza. Las cabeceras de tope son, de izquierda a derecha: X min, X-max, Y-min Y-max, min Z y Z-max. Sólo el externo (S) y el pin de centro (-) de cada cabezal de 3 pines se utilizan con topes mecánicos. Como el Kossel tiene topes máximo solamente, los topes X min y min Y no se utilizan. La posición de Z-min se utiliza para la sonda de Z. Los puentes de la imagen no son necesarios.
- Comenzar con el Z-tope en fila 6 (Z-max), como se muestra. Si encabezado I2C está presente en sus rampas, tenga cuidado de no ponerlo en I2C de 4 pines por error!
- A continuación la sonda de Z en la fila 5 (Z-min)
- Seguida de la Y-tope en fila 4 (Y-max)
- Terminar con el X-tope en la fila 2 (X-max).
- Conecte el cable del termistor de hotend para el primer par de pasadores de termistor con T0.
- Si no ya de paso 1407, conectar los motores X, Y, Z y E como se muestra. Hay 2 filas de pines de Z-se puede utilizar cualquiera de los dos.
- Conectar el hotend a la + D10 marcada y pines en la placa de rampas. Los cables de hotend no están polarizados.
Coloque los cables de listón de controlador de LCD a la tarjeta de conector y al Consejo a AUX3 y AUX4 en el tablero de rampas. Hacer que und EXP1 EXP2 ir en sus respectivos conectores.
Esto concluye el cableado básico. Se va ser arreglado más tarde, después de la puesta en marcha, una vez que se confirma como trabajo.












