Paso 2: Transmisión de movimiento


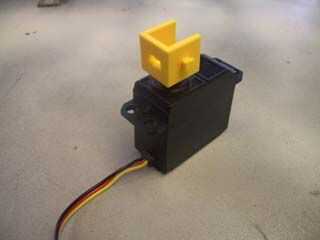

He quitado el cuerno X e inserta un cuerno tornillo de montaje. (Normalmente los brazos radiales se sujetan con un tornillo pequeño, pero en este ejemplo faltaba el tornillo. Utilicé un tornillo de un servo de paralaje). He podido integrar a:
* Puntal
* Viga
* Adaptador circunferencia
Usando un tornillo más largo, sería capaz de montar un bloque 15 con cajeado, o un collar plano de eje y una tuerca del eje (y una gama de elementos de engranaje y la leva) en el servo.
CONCLUSIÓN: Se pueden integrar terceros servo motores en robots fischertechnik original!









")
")

