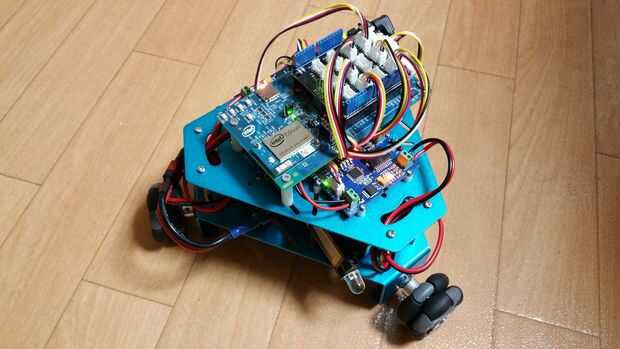
Ultimamente he estado trabajando en un kit simple, respetuosa del hackathon para robótica móvil basado en el módulo Intel Edison. Mis metas son un robot capaz de navegación autónoma y movimiento omnidireccional para menos de $250, todo incluido (el procesador y batería, así como todas las mecánica y electrónica). Quería también que es posible construir sin soldaduras en menos de una hora ("soldar" no es porque es difícil de conseguir en algunos locales de la hackathon, como salones de hotel).
Mientras que mi "kit" no es todavía completa estoy compartiendo mi progreso actual aquí, entonces a actualizar como evoluciona. Ahora el sistema tiene algunos problemas: Necesito un paquete de buen sensor para navegación autónoma, la solución de cableado es mejorable, no es completamente libre de soldadura y necesito una manera mejor para hacer detección de nivel de batería. Sin embargo, el sistema básico está cerca de satisfacer mis objetivos, y el sistema puede hacer una buena base para su propio proyecto de robótica.
También estoy trabajando en una pila de software basada en Node.js como una evolución del curso que he enseñado sobre el uso de Node.js para programar aplicaciones de IoT. Que también no es todavía listo para el lanzamiento pero el final de este instructable estoy incluyendo un simple script de prueba de Node.js que demuestra la mayoría de las interfaces de hardware necesario. Puede además utilizar como base para tus propios proyectos.
Aquí debo mencionar que soy ingeniero de Intel pero cualquier opinión que quiero expresar aquí mi propia.


")

")




)")



