Paso 4: giroscopio de 3 ejes medida partícula código:
Permite iniciar con el código de la partícula ahora.
Mientras que usa el módulo sensor con arduino, se incluye biblioteca de application.h y spark_wiring_i2c.h. Biblioteca "application.h" y spark_wiring_i2c.h contiene las funciones que facilitan la comunicación i2c entre el sensor y la partícula.
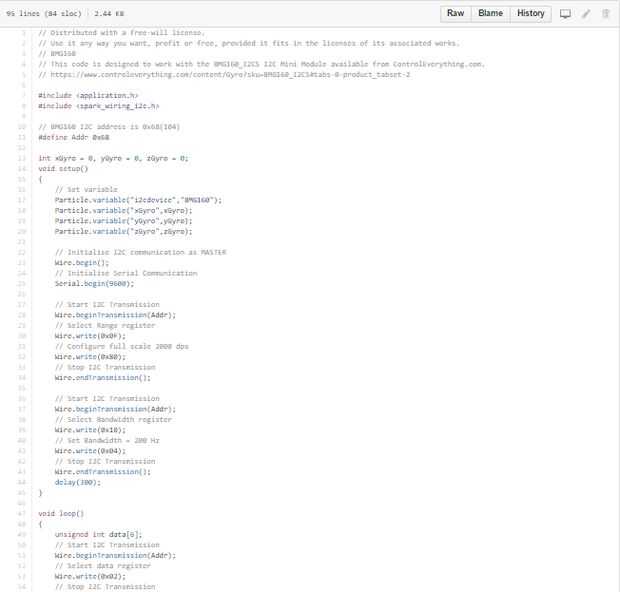
El código de toda partícula se da a continuación para mayor comodidad del usuario:
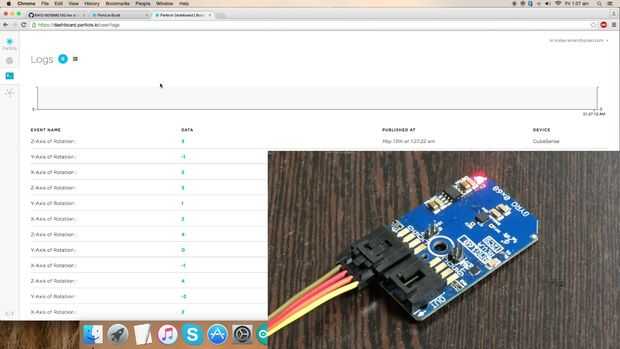
#include<application.h>#include<spark_wiring_i2c.h> // BMG160 I2C address is 0x68(104)#define Addr 0x68 int xGyro = 0, yGyro = 0, zGyro = 0;void setup(){ // Set variable Particle.variable("i2cdevice","BMG160"); Particle.variable("xGyro",xGyro); Particle.variable("yGyro",yGyro); Particle.variable("zGyro",zGyro);// Initialise I2C communication as MASTER Wire.begin(); // Initialise Serial Communication Serial.begin(9600); // Start I2C Transmission Wire.beginTransmission(Addr); // Select Range register Wire.write(0x0F); // Configure full scale 2000 dps Wire.write(0x80); // Stop I2C Transmission Wire.endTransmission(); // Start I2C Transmission Wire.beginTransmission(Addr); // Select Bandwidth register Wire.write(0x10); // Set Bandwidth = 200 Hz Wire.write(0x04); // Stop I2C Transmission Wire.endTransmission(); delay(300);}void loop(){ unsigned int data[6]; // Start I2C Transmission Wire.beginTransmission(Addr); // Select data register Wire.write(0x02); // Stop I2C Transmission Wire.endTransmission(); // Request 6 bytes of data Wire.requestFrom(Addr, 6); // Read 6 bytes of data // xGyro lsb, xGyro msb, yGyro lsb, yGyro msb, zGyro lsb, zGyro msb if(Wire.available() == 6) { data[0] = Wire.read(); data[1] = Wire.read(); data[2] = Wire.read(); data[3] = Wire.read(); data[4] = Wire.read(); data[5] = Wire.read(); } delay(300);// Convert the data xGyro = ((data[1] * 256) + data[0]); if (xGyro > 32767) { xGyro -= 65536; } yGyro = ((data[3] * 256) + data[2]); if (yGyro > 32767) {yGyro -= 65536; } zGyro = ((data[5] * 256) + data[4]); if (zGyro > 32767) {zGyro -= 65536; } // Output data to dashboard Particle.publish("X-Axis of Rotation :", String(xGyro)); Particle.publish("Y-Axis of Rotation :", String(yGyro)); Particle.publish("Z-Axis of Rotation :", String(zGyro)); delay(1000);}













