Paso 7: Motores y potenciómetros



Motores paso a paso
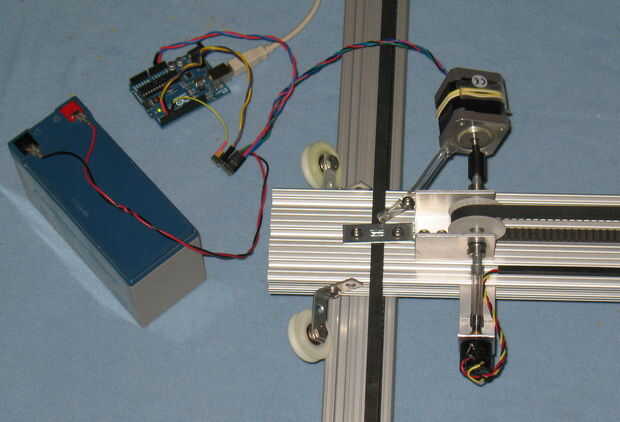
Hemos intentado usar motores paso a paso y los que estaban bien, pero ligeramente bajo con motor para esta aplicación (para el eje X): eran 1,2 amp los de chip. Chip también tiene un tablero de portador de conductor de pasos de bajo costo que puede trabajar con ellos. Funcionó bien para el eje Y, pero un mayor paso de potencia sería mejor para el eje X desde que t-ranura de 1 x 3 etc. es mucha masa para mover el tamaño del motor paso a paso hemos tratado. Funcionó, sin embargo, sólo saltan unos pasos, hasta que hemos añadido algunos aceleración a los comandos de paso a paso. Por lo tanto, este enfoque seguramente trabajará con la afinación correcta de la aceleración y tamaño del motor. Necesita algo así como un Arduino para conducir, aunque (que es lo que hicimos), para hacer los pasos. También, puede que necesite añadir algunos interruptores de límite - un problema mayor para el entorno limitado de TeleToyland ya que nos gustaría Inicio automáticamente el robot con cada secuencia dado que ejecuta desatendida. Todo es factible. Las partes juntos cuestan alrededor de $100 (steppers son ~ $18, los conductores son ~ $13 y Arduino Uno es ~ $30).
Codificadores de + motores de la C.C.
También intentamos utilizar motores con encoders y un tablero de conductor RoboClaw. Que también funciona, pero la Junta proporciona PID para la velocidad y no posición, por lo que no era tan precisa para este tipo de aplicación como esperábamos. Han sido grandes para algunos otros proyectos robot, sin embargo. Sin duda puede obtener controladores de posición (caro) más precisas. No entramos en ello demasiado - es bien usado material en foros CNC. Como con los steppers motores con encoders, también necesitaría algunos interruptores de límite para nuestra aplicación.
Los potenciómetros + motores de la C.C.
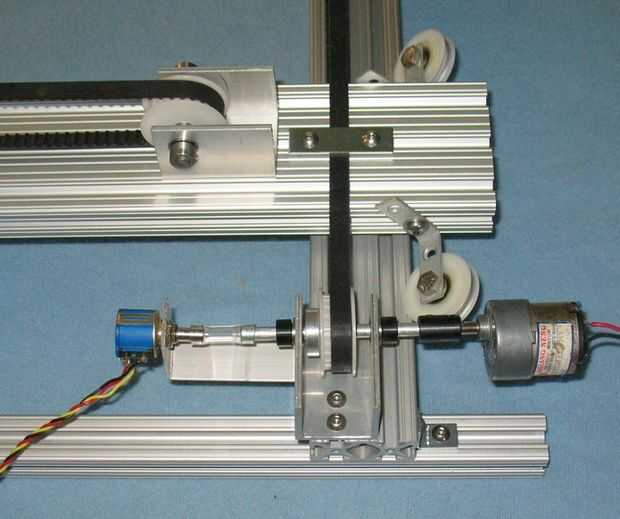
Al final, decidimos utilizar los controladores de motores Pololu JRK 21v3 ($50), con motores de Lynxmotion (GHM-16 - 22$)-usted puede obtener otros similares en otros lugares - son 12v 200 RPM reductor motores con ejes de 6mm (bien cerca de los 1/4" los ejes que estamos utilizando). Lo bueno de este diseño es que usted puede elegir cualquier tipo de motores que le gustaría.
Otras velocidades funcionan bien también. En 6,66 revoluciones cubriendo 29,25" en el eje X de las poleas que utilizamos y 200 RPM (3.33 RPS), que es aproximadamente 10-15 pulgadas por segundo viaje, dependiendo de la rampa hacia arriba y abajo etc.. El tiempo de tránsito completo es 2-3 segundos y se divide aproximadamente 400 por el motor de RPM (6,66 rotaciones / RPM / 60 segundos por minuto).
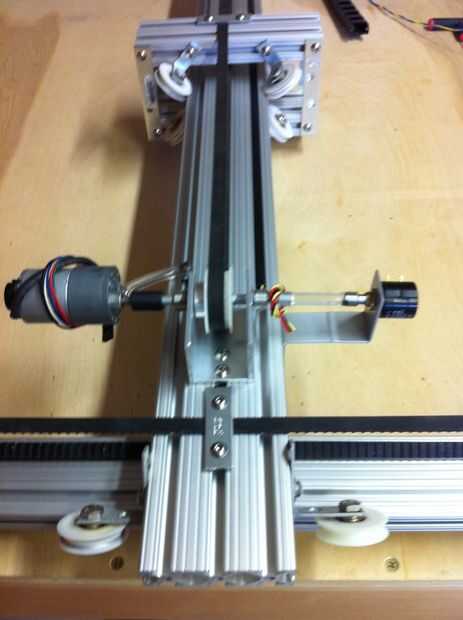
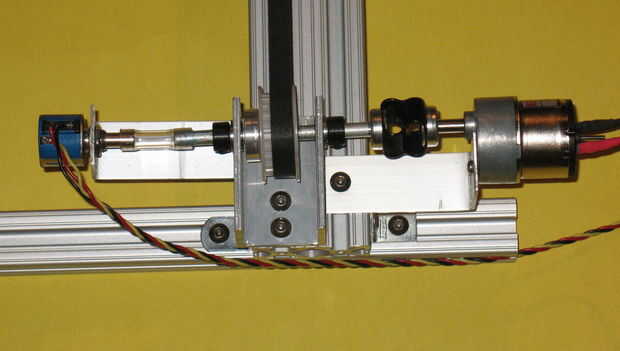
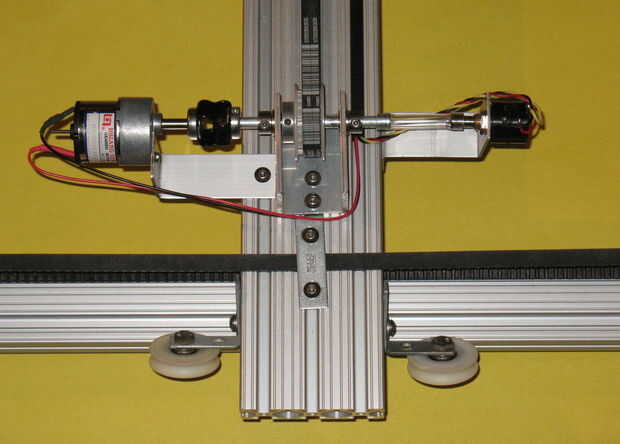
Los motores están conectados a los collares de eje de 1/4". Puesto que los motores tienen un eje de 6mm, es bastante estrecha. Para mantener los motores de giro, nosotros libremente fijarse con algún tubo de plástico para permitir que los motores para moverse, que lo hacen mucho. Utilizamos 3/6" diámetro interior x 5/16" fuera de la tubería de diámetro.
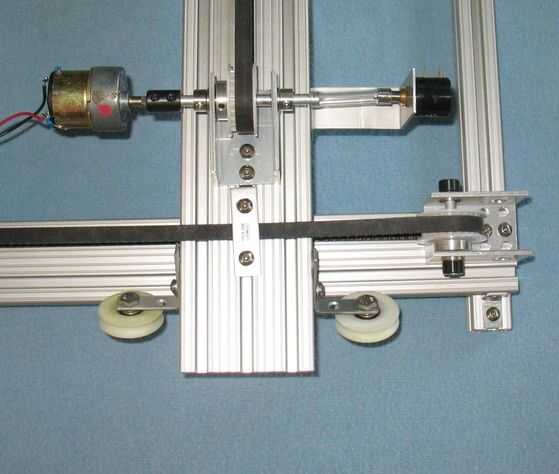
Un enfoque alternativo de montaje es hacer soportes para los motores de algunos aluminio chatarra (hemos utilizado 1" de ancho por 1/6" de espesor) y utilizan acopladores de eje flexible. Ver las fotos de ambas técnicas de montaje. Estos soportes fueron 4" largo y doblado a 90 grados en 2.5" a lo largo de la longitud del punto. Ambos métodos de montaje funcionó bien para nuestra aplicación, aunque los acopladores de eje flexible son un poco más estrictos para aplicaciones de tipo CNC.
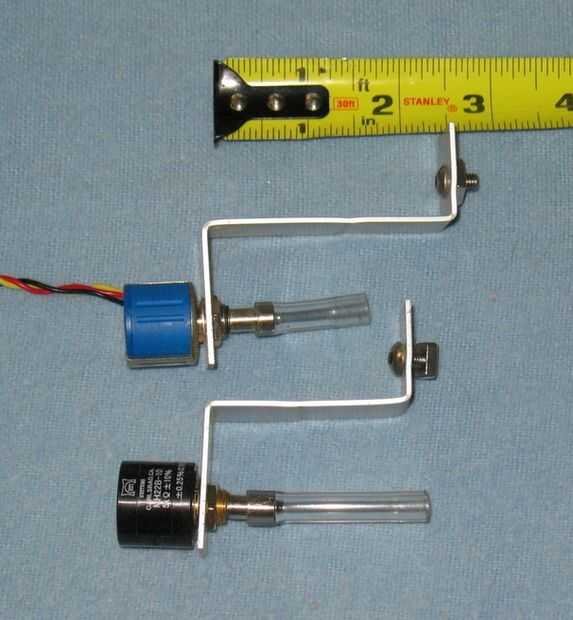
Como con el anterior proyecto, utilizamos potenciómetros 10 de vuelta. Son 5K ohms como los usados en servos de hobby. JRK, pudimos probar algunas marcas de fábrica para ver cómo lo hicieron, y los dos que probamos parecían bastante similares. La serie de MH22B ETI los es casi $100 ahora (eran menos cuando llegamos les), y serie de Bourns 3540 es alrededor $20. Otros han visto en unos 10 dólares, pero no han probado bien. Tenemos la serie de MH22B ETI los antes cuando estábamos preocupados por la vida - se clasifican en 10 millones de vueltas, mientras que la mayoría de los otros son en 1 millón. Tuvimos un problema antes de la falla de la olla, pero en retrospectiva, que fue por el montaje mecánico fijo y el pedazo corto de tubería plástica de conectar los potenciómetros para las correcciones de los ejes que emiten, por lo que los potenciómetros menos costosos deben estar bien. Así, que los menos costosos y ahorrar algo de dinero.
Para los dos hemos probado, ambos mostraron la gama completa y los detalles en el JRK - pasos de 0 a 4095, y podríamos conseguir que se mueven en pasos de una unidad, aunque para muchos lugares, oscilar el valor de una unidad. Sobre el 29,25" recorrido del eje X, tenemos Linda 2678 unidades (previa calibración) de movimiento (ya que su ~6.66 se convierte de la correa polea dentada - menos que el rango completo 10-vuelta), por lo que la precisión es teóricamente 0,01". Si usted asume la mitad obtenemos que con la oscilación de una ocasional de la unidad, sería alrededor de 0,02"(1339 unidades). En la práctica, es probablemente no que precisa.
Una comparación interesante: el motor paso a paso hemos tratado tiene pasos completo de 1.8 grados, por lo que a revoluciones de 6,66, pasos de 1332 - casi lo mismo que el enfoque que estamos utilizando. Microstepping teóricamente podrían obtener una mayor precisión, pero no estamos seguros de cuáles son los límites en la mecánica etc..
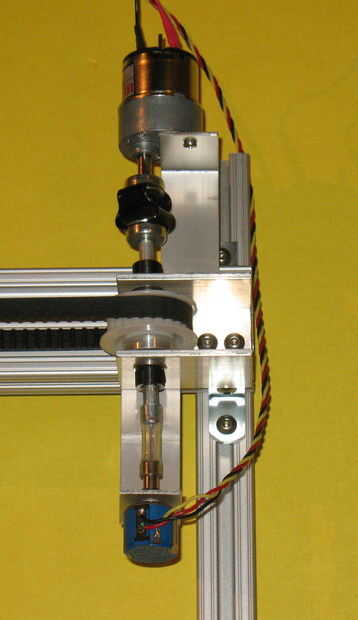
Para los potenciómetros, hicimos algunos soportes de algún desecho 1" aluminio ancho (1/6" de espesor). Para evitar el desgaste de los cojinetes del potenciómetro, utilizamos algunos 3/16" OD ID x 5/16 tubería plástica para conectar a los ejes. Ver las fotos para el espaciamiento de soporte.
Finalmente agregamos abrazaderas de tubos en el lado del potenciómetro de cosas - uno en el potenciómetro y otro en el eje. Con la rampa hacia arriba y abajo de la velocidad, hemos pensado no sería necesarias, pero notó algún resbalón en el tiempo.
Aquí está un vídeo de muestra de un motor paso a paso en el eje Y. El eje X necesita más energía puesto que se necesita para mover el eje todo Y demasiado.
Ya que algunas personas han solicitado el código paso a paso, he adjuntado lo que utilicé en el video a este paso - el archivo zip. Esperemos que te ayudará, pero no es mucho y no bien comentado o cualquier otra cosa.
")












