Paso 4: Diseño mecánico
Base
El rover está diseñado alrededor de la plataforma de Zumo, que es un pequeño rover recauchutado. Elegí este modelo porque es compacto y fácilmente ampliable. La base tiene muchos agujeros de montaje y un compartimiento de la batería incorporada en el centro del chasis, dándole un agradable, bajo centro de gravedad para la estabilidad adicional. Los peldaños proporcionan un montón de tracción en una variedad de superficies y destacan en comparación con otras bases de la rueda.
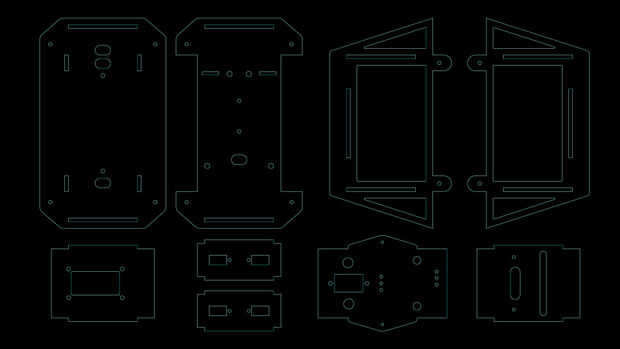
Diseño de chasis
El Zumo es un gran comienzo para el montaje de otros componentes electrónicos. Para mantener todo en su lugar, he diseñado un chasis de acrílico que los pernos en la base del Zumo. El chasis está diseñado para ser laser cortar de acrílico de 3 mm (~1/8in) y atornilladas sobre todo nylon 2-56 y unos tornillos de metal 4-40. Usando tornillos de plástico (es decir, no conductor de electricidad) para el montaje de la electrónica reduce la posibilidad de cortocircuitos eléctricos. He unido los archivos vector anteriores (si no tienes acceso a un cortador láser, usted puede utilizar un servicio como Ponoko). Acrílico es rígido y barato como un cuerpo material, pero es bastante frágil, así que doblé cualquier arista que podría entrar en contacto con un objeto mientras el robot está en movimiento. El chasis es bastante abierto, que consiste en un alto de "torre" que proporciona ranuras para las placas de montaje que sujetan el Edison, interruptor y controlador de motor. Este diseño mantiene todo lo visible y de fácil acceso debo necesito para desmontar el bot o cambiar un componente. El diseño del perno-junto permite todo para quedarse seguro, pero desprendible. Accesibilidad en el diseño dificulta la solución de problemas mucho menos cuando tiene que pasar,













