Paso 2: Tipos de motores paso a paso

Hay un puñado de diseños del motor paso a paso diferentes; Estos incluyen renuencia unipolar, bipolar, universal y variable. Vamos a discutir el diseño y operación de motores bipolares y unipolares, como estos son el tipo más común de motor vendido y las clases es más probable encontrar si estás consiguiendo motores de otros aparatos electrónicos.
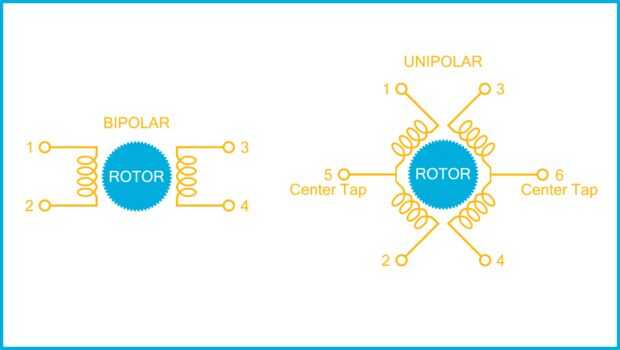
Motores unipolares
Motores unipolares tienen cinco, seis u ocho plomos de alambre que se extiende desde la base y una bobina por fase. En el caso de un motor de cinco cables, el cable quinto es la grifería se unió a centro de los pares de bobina. En un motor de seis hilos, los pares de bobina cada uno tienen su propio grifo de centro. En un motor con los ocho cables, cada par de bobinas se separa totalmente de los demás, lo que le permite conectarse en diferentes configuraciones. Estos cables extras permiten motores unipolares ser conducido directamente por un controlador externo con simples transistores para manejar cada bobina individual. El patrón de la leña en que se conduce cada bobina determina qué dirección girará el eje del motor. Desafortunadamente, dado que sólo una bobina se energiza en el momento, el par de retención de un motor unipolar siempre será menor que el de un motor bipolar del mismo tamaño. Pasando por alto las llaves del centro de un motor unipolar, ahora puede ser conducido como un motor bipolar, pero requerirá de un esquema de control más complicado. Realidad conduciremos un motor unipolar en el paso cuatro de este instructable, que debería aclarar algunos de los conceptos introducidos por encima.
Motores bipolares
Motores bipolares suelen tienen cuatro cables y son más fuertes que un motor unipolar de tamaño comparable, pero puesto que sólo tenemos una bobina por fase, necesitamos revertir la corriente a través de las bobinas para caminar. La necesidad de invertir los medios actuales no podremos conducir directamente las bobinas con un solo transistor, sino con un circuito completo h-puente . Construcción de un puente de h adecuado es tedioso (dejar sólo dos!), razón por la cual usaremos un dedicado conductor bipolar del motor (ver paso 5).











")

