Paso 4: Configuración del avión
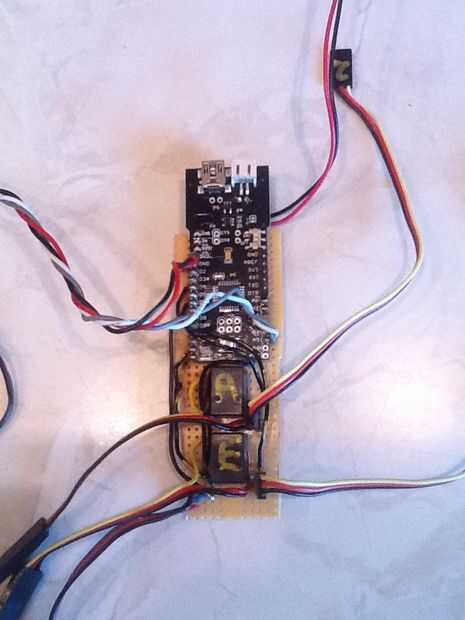
He añadido el sistema a mi Swift en (entrenador de alerón). Me gusta esta vela. No se necesita mucho viento para volar y es capaz de una variedad de maniobras. Vuelo con un planeador es genial si tienes el viento, se puede volar por horas (sin motor / no motor necesidad de bajar y cargar combustible).
Nuestra nueva junta establecer será muy similar a la orignial PID; nos va a correr dos lazos PID nuevamente adelante muy rápidamente para controlar la echada y del rodillo con el elevador y alerones. Esto debería permitir un amplio tiempo de buen viento.
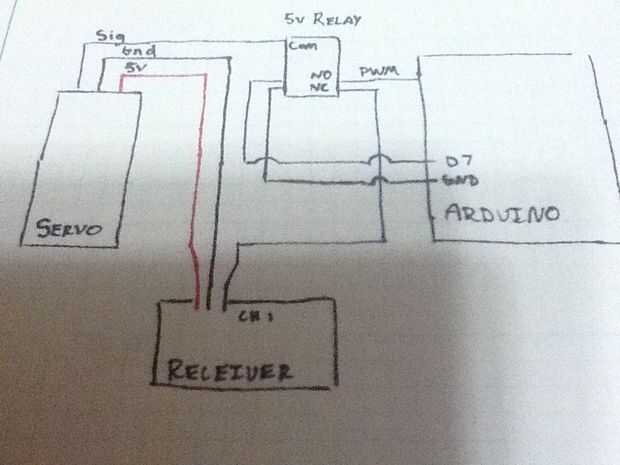
Estoy usando equipo de radio Airtronics con un transmisor/receptor de 6 canales. Usé el canal de quinta en la radio (una palanca del tren de aterrizaje) para configurar el piloto automático encendido y apagado desde el transmisor. Conectar a un cable de servo del receptor y conectarla a una entrada digital para medir el pulso largo de las dos posiciones (cambiar en / alternar apagado). Utilice la función pulseIn() hacerlo. Una vez que tenga un valor de los dos Estados elegir uno para indicar apagado y otro para el. Cuando arduino Lee y en señal de debe enviar un alto digital flip un relais o desencadenar algunos transistores. He utilizado relés porque no quiero que mi señal que pasa a través de un transistor (una decisión lamentaría más adelante).
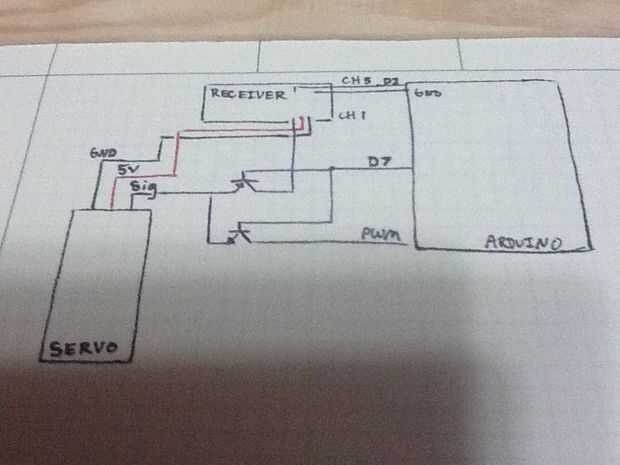
Puedes ver los esquemas que dibujé para el cableado de un circuito que lanzaría un servo de la radio a arduino. Hay dos: uno para transistores y otra para una radio. Tenga en cuenta la posición de los transistores PNP y NPN. Cuando la salida de arduino del alambre es baja los defectos de la señal de servo a la radio, cuando está escrito alto cambia a la Junta. Asimismo, en el circuito del relé, el terminal normalmente cerrado está conectado a la radio y el normalmente abierto para arduino.
Usted puede encontrar mis funciones para el autopilot_engage en la parte inferior de este paso
Aquí está un video que muestra el arduino recibir radio entrada y lanzando un led, utilizado más adelante para activar el piloto automático:
http://www.youtube.com/watch?v=lnx86vT9YXA&feature=g-UPL






")






