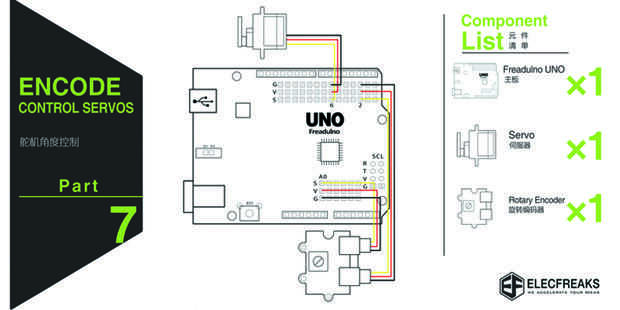
Paso 7: Servo de control paso 7:Encoder sensor
![]()
/* PART7 Encode Sensor CONTROL Servos Turn the rotary encoder control servos */ #include int encodeB= A0; // The A0 pin,read encodeB int servos = 6; // The 6 pin,driving the servos Servo servo; //Get a servo controller int angle=90; //set the servo angle void setup() { pinMode(encodeB,INPUT);// initialize the encodeB pin as an input. servo.attach(servos); attachInterrupt(0,start,FALLING);//set encodeA interrupt,this board interrupt0 is pin 2 } void loop() { } void start(){ if(digitalRead(encodeB)==HIGH){ angle-=30; }else angle+=30; if(angle>=180)angle=180; else if(angle<=0)angle=0; servo.write(angle); }











")
")