Paso 6: Conecta cosas y hacer algo real - USB Serial parte 2

Este paso muestra cómo hacer algo real, detección de movimiento con tu PC y reaccionar a él.
Mayoría de los sensores PIR tiene salida pin que indica cuando se detecta movimiento en una digital.
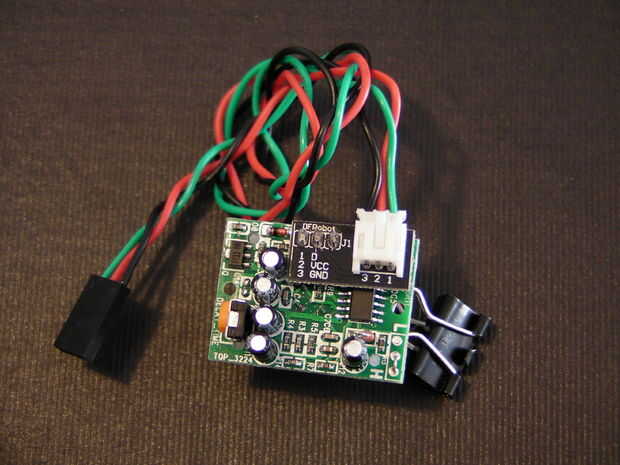
El DFRobot Sensor toma 3-5V al pin izquierdo, Gnd al pin derecho y salida digital desde el pasador central. A diferencia de la información en su sitio web, la salida es alta cuando se detecta movimiento. Me di cuenta de un puente soldado con H & L (esquina inferior izquierda en la foto dos ), así que sospecho que esto puede ser modificado para requisitos particulares si es necesario.
Coge la placa del paso anterior, retire el interruptor más lejos lejos del conector USB. A continuación conectamos el Sensor de PIR.
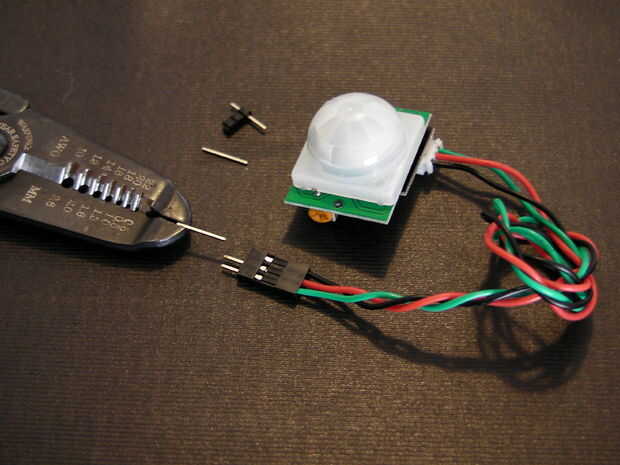
Cuando ordené mi sensor de DFRobot parecía cuadro uno , lo que consiguió entrega fue como se muestra en las fotos dos y tres , se ha añadido una pequeña placa con un conector JST y suministra un JST hembra 0,1" pin conector.
Si tu sensor es como la imagen de uno , enchufe la placa en el lado con los cables menos, para donde el estaba (después de hacer el cableado siguiente o se pone en el camino).
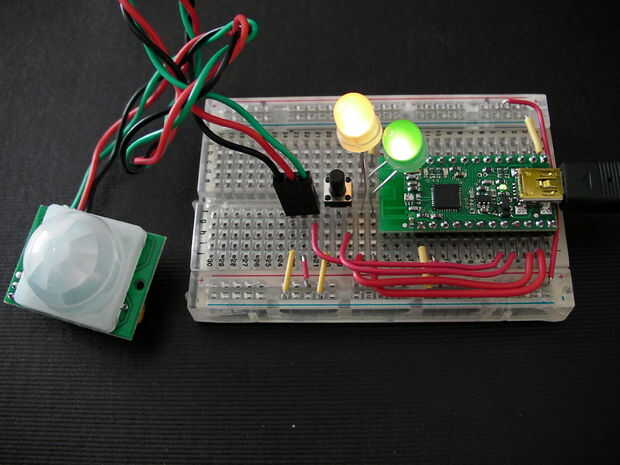
Entonces utilice el cable de puente para conectar la ive pin a + la + autobús ive - ive pin al bus - ive (Gnd) y el pin de salida a la fila que se conectó al pin P1_3 (/ CD), es decir, fila 18. Como no tengo uno como este no puedo muestro una imagen, pero el cuadro cuatro donde he etiquetado las filas a utilizar.
Si tienes el sensor con los cables JST, necesita a tira-hacia fuera tres encabezado alfileres e insertar en 0,1" perno zócalos, véase el cuadro 3 y leer las etiquetas; definitivamente necesita pinzas para ello. Esto le permite conectarse a la protoboard. Este es un hack como yo no tenía el cable apropiado o el adaptador, no lo hace para nada importante.
Por suerte ellos line con el cableado actual de la Junta, enchufe en donde estaba el interruptor, con el cable negro más lejos lejos de la toma USB, un puente de alambre a la fila del medio a la + bus de ive, véase el cuadro 4 .
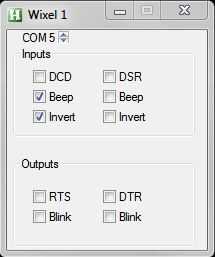
OK, ahora ejecutamos el SerialPortGeneralIO.exe , debería ver /DCD cuando se detecta movimiento, usted puede marcar la casilla de sonido y tiene una alarma de movimiento básico. Recuerde que /DCD es invertida, así que marque la casilla de invertir - que sonará la campana sólo cuando se detecta movimiento. Véase el cuadro 5 .
Por supuesto podría hacer otras cosas como enviar una alerta de correo electrónico, reproducción de los sonidos de las armas se carga y alguien wispering 'su aquí, estás listo, me quedo con el primer chico ";)
Suficiente de las cosas simples.
Próximo - enchufar cosas y hacer algo real - con un Arduino.

")











