Paso 4: Control de velocidad del motor y vuelta encendido un LED (opcional)
Una vez que vamos a utilizar un puente H, el L293-D para control de motor, tenemos que decidir si además de dirección, también queremos control dirección.
Dos posibilidades aquí:
- Velocidad fija: conexión de puente de H permiten pernos (1 y 9) a + 5V (full velocidad) o cualquier otro valor proporcional utilizando un divisor de voltaje con los 2 resistores
- Habilitar los pines 1 y 9 conectado a frambuesa Pi GPIO.18
Generalmente puede mantener la velocidad constante, pero vamos a explorar cómo controlarlo. Para que una señal PWM debe ser usada. Vamos a crear un grupo de secuencias de comandos, igual que hicimos con "direcciones" (los valores se deben probar su motor específico):
sudo nano nospeed.cgi
#! / bin/bash
GPIO pwm 1 0
.
sudo nano lowspeed.cgi
#! / bin/bash
GPIO pwm 1 250
.
sudo nano regularspeed.cgi
#! / bin/bash
GPIO pwm 1 512
.
sudo noano highspeed.cgi
#! / bin/bash
GPIO pwm 1 1023
.
Una vez creados los scripts deben darles permisos para ser ejecutado, al igual como se hizo con forward.cgi
sudo chmod 755 nospeed.cgi
sudo chmod 755 lowspeed.cgi
sudo chmod 755 regularspeed.cgi
sudo chmod 755 highspeed.cgi
Ahora, es sólo ejecutar algunas pruebas para confirmar que todo está funcionando:
. / lowspeedcgi
./regularspeed.cgi
./Highspeed.cgi
. / nospeedcgi
En mi caso, en el escenario tengo un LED conectado a GPIO.18, para que pueda ver por la intensidad de su brillo, que está funcionando el comando.
Último pero no menos importante, vamos a tener una secuencia de comandos adicional para controlar una salida digital, para encender o apagar una lámpara, por ejemplo. Vamos a utilizar el GPIO.10 para:
sudo nano llighton.cgi
#! / bin/bash
GPIO -g escribir 10 1
.
sudo nano llightoff.cgi
#! / bin/bash
GPIO -g escriba 10 0
.
sudo chmod 755 lighton.cgi
sudo chmod 755 lightoff.cgi
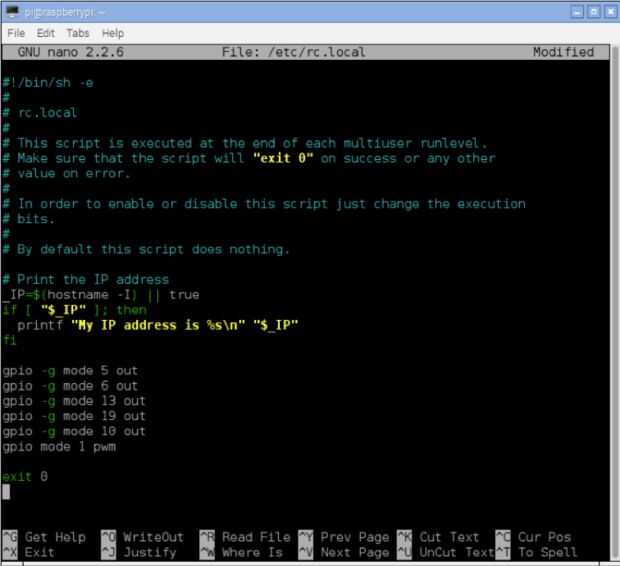
Igual que antes si usted decide utilizar los GPIOs adicionales, debe cambiar el script /etc/rc.local:
sudo nano /etc/rc.local
…
modo de GPIO -g 5 a
modo de GPIO -g 6 a
modo de GPIO -g 13 a
modo de GPIO -g 19 a
modo de GPIO -g 10 a
GPIO modo 1 pwm
exit 0
Es bueno tener el gpio modo 1 pwm como la línea de la lista antes de exit 0













