Paso 7: Montaje del cuerpo del Robot



Lo primero es encontrar una plataforma. Tuve un kit 4WD con 4 motores de corriente continua. Me di cuenta que no es fácil controlar el 4WD y una vez que la idea aquí no es un análisis de la movilidad, que montado en el coche, pero prueba de verdad sólo se utilizan 2 de las ruedas y una coster (tuvo un rollo desodorante utilizado).
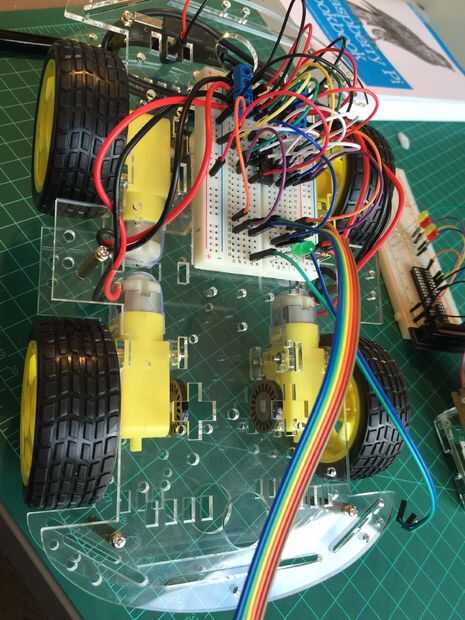
Después de que el cuerpo y los motores están en su lugar, es tiempo para incluir un protoboard, hacer las conexiones del motor y prueba. Use la batería externa para cada uno de los motores.
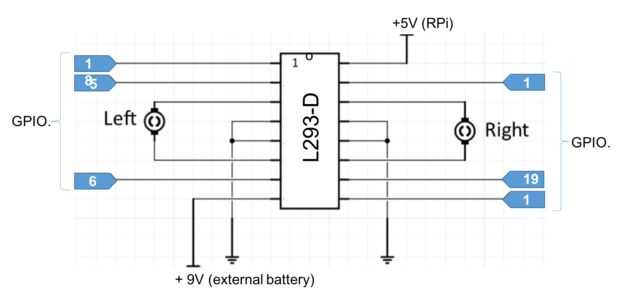
Los motores serán controlados por un puente H L293-D como se muestra en el diagrama. En este punto también puede hacer pruebas de control de los motores con + 5V y GND sondas entradas del puente H, simulando los GPIOs de RPI.













