(Si te gusta este Instructable, no olvide votarlo - arriba: bandera de la esquina a la derecha. Compite en concursos de automatización y de INTERNET de las cosas. ¡Muchas gracias! ;-)
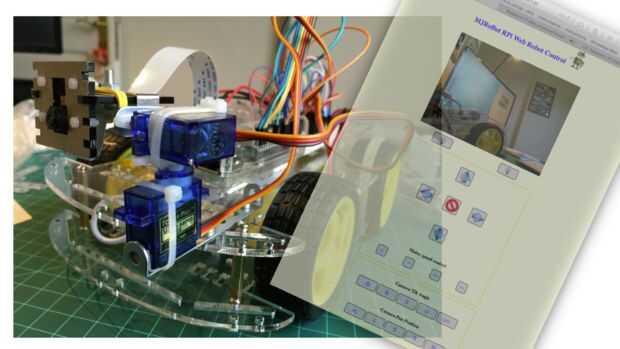
Esta es una segunda parte de mi Intructable anterior: IoT - controlar un Raspberry Pi Robot por internet con HTML y shell scripts sólo. Allí aprendes a controlar motores de corriente continua por internet. Aquí vamos a aprender cómo para streaming de video usando un PiCam y también remoto controlar su posición (Pan/Tilt), uso de servo motores. Control de una cámara por internet puede tener varias utilidades, incluyendo para uso en seguridad. Como un ejemplo en particular, vamos a instalar la cámara y los servos en el robot que se convirtió en la primera parte del proyecto.
El siguiente video te dará una idea acerca de cómo el proyecto final se ve como:
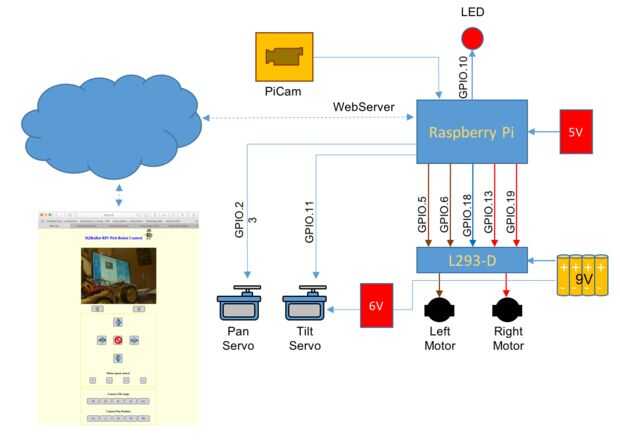
El diagrama de bloques muestra la idea del proyecto. El IPC se establecerá como un servidor Web y recibe comandos desde una página HTML. Los comandos de control de los GPIOs, haciendo el IPC Coloque el PiCam mediante servomotores (posición Horizontal/Pan y Tilt/Vertical).







 con control remoto en frambuesa Pi 2")




.")
