Paso 1: mecánica
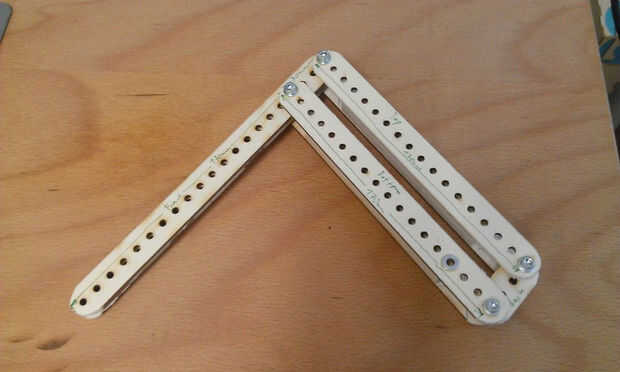
Desde el principio fue muy claro, que un robot cartesiano con ejes x e y - no ves la "steampunky" lo suficiente y por lo tanto, el diseño de un enfoque más elegante, como un brazo de robot real. Teniendo en cuenta que tendría que construir, construir, controlar y terminar no sólo la robusteza sí mismo, sino también el gabinete de exhibición, decidí utilizar actuadores como pocos como sea posible. Por lo tanto un sistema de cinemática en paralelo sobre una plataforma giratoria parecía razonablemente sencillo.
Se utilizó un prototipo de cartón lasercut rápida para verificar que la funcionalidad deseada y determinar las dimensiones correctas (la distancia de alcance debe cubrir toda la superficie del iPad, pero también se restringió el tamaño total del robot).
Este diseño permite que el robot – teóricamente – trabajar en un espacio 3D, pero decidí usarlo sólo en un sentido 2, de 5D, que hace la programación mucho más fácil y más rápido (primera regla de ingeniería eficaz: hacer lo "suficientemente bueno" en lugar de "lo mejor posible").
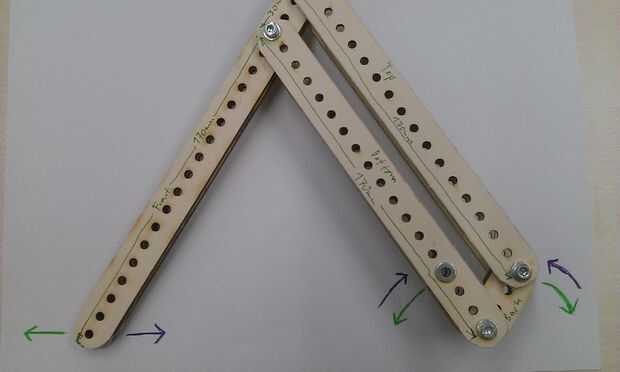
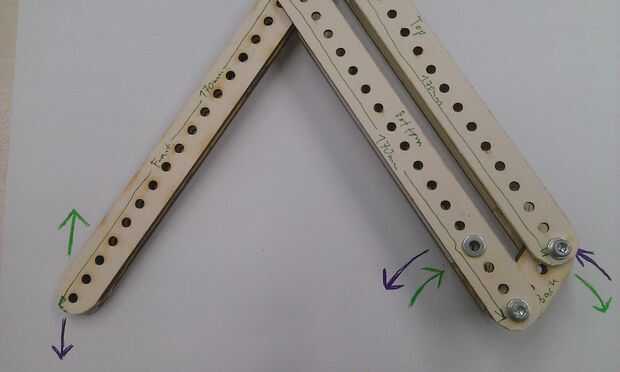
Las funciones son las siguientes:
Giro izquierda <> – derecha: Base Servo
Ampliar/contraer: Gire ambos servos brazo en direcciones opuestas (que en realidad significa enviar la misma señal en ambos servos por su espejo orientación – excepto valores de recorte, pero más que un poco más adelante)
Esto debería – en teoría – hacer la punta del movimiento del brazo de robot paralelo a la superficie del iPad.
Escribir: girar ambos servos de brazo en la misma dirección
[skizze der Drehrichtungen]













