Paso 3: Prototipo de trabajo
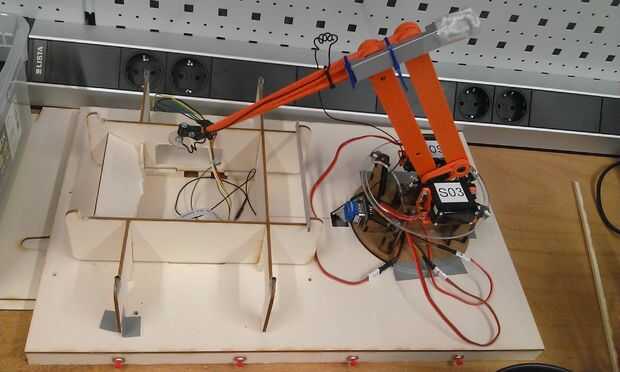





Antes de diseñar el robot completamente, construir un prototipo, que tenía las dimensiones correctas, rodamientos de bolas, servos, etc. pero sin los elementos steampunk, ya que quería comprobar problemas mecánicos con el diseño.
Esto condujo a algunos cambios, el más notable siendo un mucho más grueso y por lo tanto, más rígida versión de las piezas de brazo, mejorada mediante el uso de material PCB (tablero de fibra de vidrio). Esto también me dio la oportunidad de incluir algunos detalles de lo contrario muy desperdiciador de tiempo en los PCB molidos. Un colega muy bueno (janth en instructables) pasar algunas horas de producción de estas piezas en lo FabLabs PCB-router.
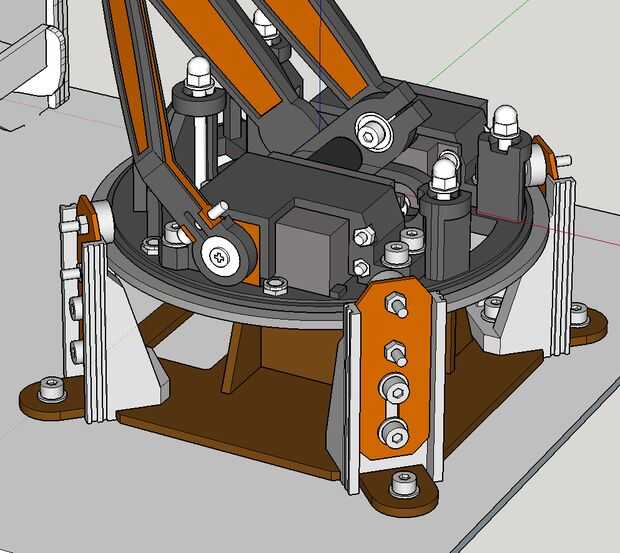
Otros cambios, como agregar un puntal adicional a la extremidad inferior y una dirección de anillo alrededor de la base eran necesarias para mantener esta cosa estable mientras se escribe durante un largo período de operación.
El prototipo también tenía un sótano con pulsadores incluidos, por lo que mi jefe y FabLab-Maestro René Bohne podrían empezar a programar el software de alto nivel.













