Paso 3: código
Conecte la placa Arduino a tu ordenador o portátil. A continuación, abra el IDE de Arduino y agregue el código siguiente en un archivo de dibujo nuevo:
Agrega la librería Servo
#include
Define Tirg y Echo los pernos del Sensor y a qué pines de poder van a estar conexión const trigPin int = 10; const echoPin int = 11;
Variables para la duración y la duración larga de la distancia; int distancia;
Servo myServo; Código que controle el servo motor void setup() {pinMode (trigPin, salida); / / establece el trigPin como una salida pinMode (echoPin, entrada); / / sistemas echoPin como una entrada de Serial.begin(9600); myServo.attach(12); / / define a que pin de alimentación está conectado el motor servo}
void loop() {/ / gira el motor servo de 15 165 grados de (int i = 15; i < = 165; i ++) {myServo.write(i); delay(30); distancia = calculateDistance(); / / llama a una función para el cálculo de la distancia medida por el sensor de ultrasonidos para cada grado Serial.print(i); / / envía el grado actual en el Serial.print(",") puerto Serial; / / envía además carácter justo al lado el valor anterior es necesario más adelante en el proceso de IDE para indexación Serial.print(distance); / / envía el valor de distancia en el Serial.print(".") puerto Serial; / / envía carácter además justo al lado el valor anterior más adelante en el IDE de procesamiento para la indexación} / / repite las líneas anteriores al girar de 165 a 15 grados para (int i = 165; i > 15; i--) {myServo.write(i); delay(30); distancia = calculateDistance(); Serial.Print(i); Serial.Print(","); Serial.Print(Distance); Serial.Print("."); } }
Función para el cálculo de la distancia medida por el sensor int calculateDistance() {digitalWrite (trigPin, LOW); delayMicroseconds(2); / sistemas trigPin en alto estado de 10 micro segundos digitalWrite (trigPin, HIGH); delayMicroseconds(10); digitalWrite (trigPin, bajo) duración = pulseIn (echoPin, HIGH); / / devuelve el tiempo del recorrido de la onda acústica en microsegundos por leer la distancia echoPin = duración * 0.034 / 2; vuelta distancia;}
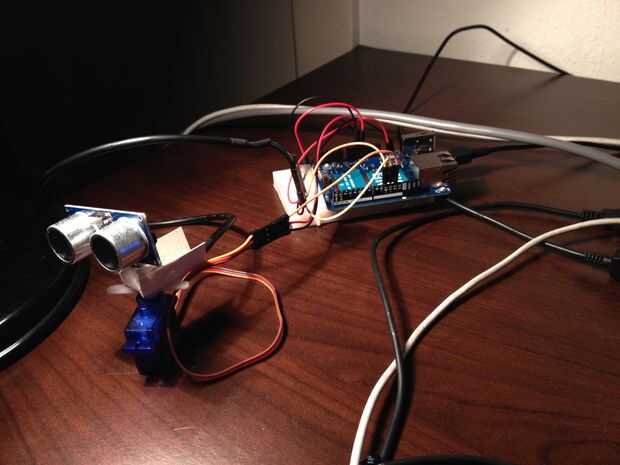
Añadir este código a tu Arduino. El motor servo se debe moverse ahora.













