Paso 9: Cableado arriba JAAR - entendimiento de su aplicación




Ahora es el momento para hacer algo interesante; todo lo incorporando que a aprendido en este instructable. Espero no era divertido hasta aún, pero sólo mantener su pensamiento ahí, la verdadera diversión está a punto de comenzar.
ADVERTENCIA:- La mayoría de los objetivos en y después de este paso se tiene que hacer únicamente comprar el hacedor.. .very ayudar a poco de mi lado
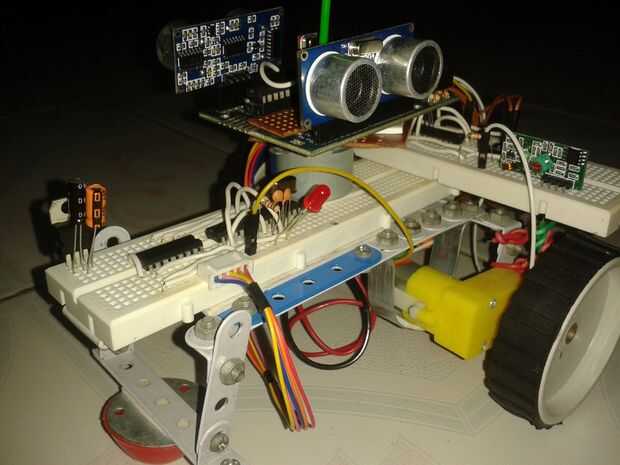
Objetivo 1:- para construir el chasis.
Cosas necesarias:-
- Sólo es imaginación, no recomendaría ningún tipo de kit o piezas específicas, hacer lo que quieras... pide prestado, comercio, busca de desechos útiles... dejo el chasis edificio totalmente hasta usted.
Lo que hice:-
Mi hermano tenía un Mechanix Zephyr tenía algunos trozos de metal al azar, bandas y planos con tornillos y tuercas, era de ninguna utilidad para él, por lo que tomado prestado y el chasis tan sutil como sea posible.
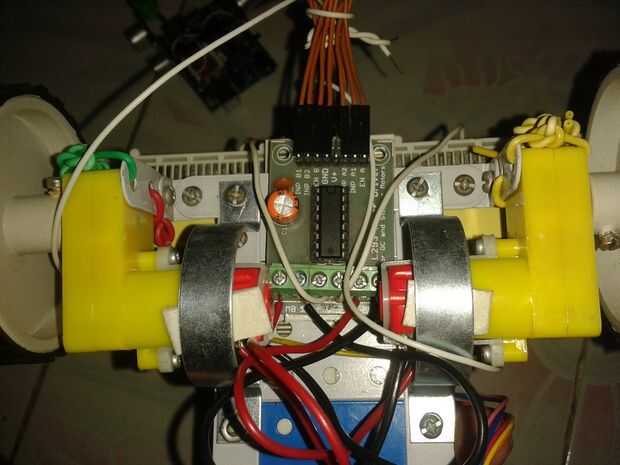
Objetivo 2:- Para fijar el 2 X rueda y Motor de la C.C.
Cosas necesarias:-
- BO de X 2 - Motor de la C.C. de desplazamiento con ruedas [de cualquier motor de menos de 200 RPM debería funcionar bien]
- 1 módulo X controlador de Motor L293D [si no tienes un módulo de tratar de hacer una viendo mis esquemas]
- 2 X U - abrazaderas de Motor
- 2 x Junta de pan (si es posible saca los dos Vcc y gnd líneas de ellos)
- Algunas tuercas y pernos si es necesario
- 1 x rueda del echador
- 1 X doble cara cinta de la espuma
- Y obviamente tu intelecto
Procedimiento:-
- Fijar el Motor a la posición deseada.
- Fijar la abrazadera en U para situar el Motor.
- Conectar el Motor al controlador de motor L293d.
- Pegar los dos breadboards posible cuidadosamente y uniformemente al chasis utilizando la cinta
- Coloque o pegue el echador de la rueda a su posición preferida.
Nota:- Recuerde que un centro de gravedad estable.
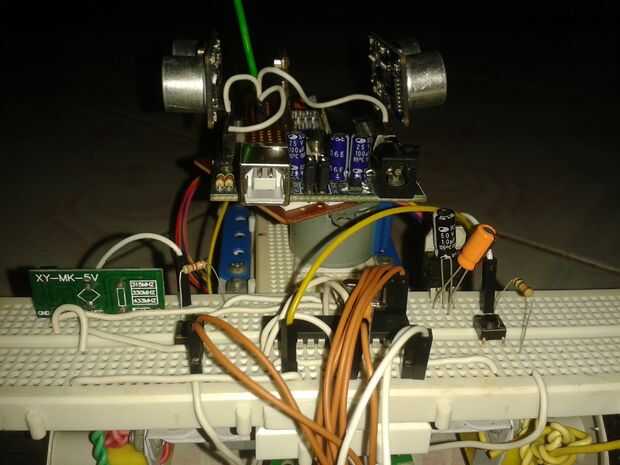
Objetivo 3:- Todo cableado hasta
Cosas necesarias:-
- Regulador de voltaje 5v x 2 (L7805)
- 3 x Atmega 328 [o lo que 28 perno AVR que tiene a mano]
- 2 x 16 MHz oscilador
- 4 x 22pf condensadores de cerámica
- 2 x 10 uF condensadores electrolíticos
- 2 x 1 uF condensadores electrolíticos
- 1 X ULN 2003 Transistor Array
- Resistencia ohm 1 x 220
- 1 x LED rojo
- 2 x 1 resistencia de ohmios k [nada más que 1 k debe hacer muy bien]
- 1 x RF - módulo RX y TX
- 1 x Motor paso a paso con una plataforma en él.
- 1 X doble cara cinta de la espuma
- 2 x botón Swicth
- Muchos cables pequeños
- Algunos cables de puente
Procedimiento:-
1. recordar todo lo aprendido en todos los pasos anteriores.
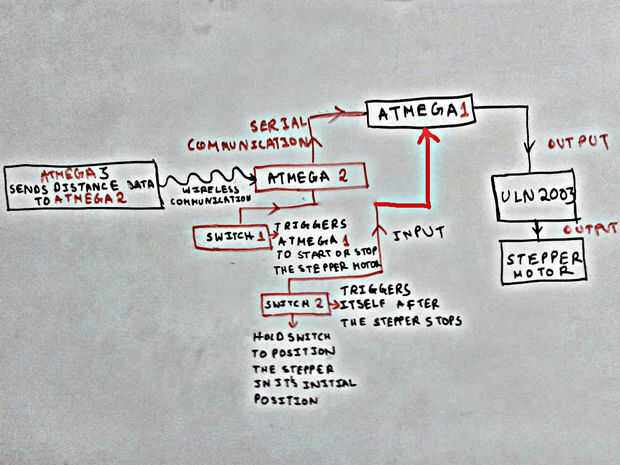
2. salida primera imagen para entender el concepto de JAAR entonces todos los cables serán piezas de un pastel. (coz allí no es sólo una sola pieza).
3. volver a los pasos que has olvidado o necesidad de recordar, no hay nada desconocido en este circuito si sinceramente ha seguido cada paso de este instructable.
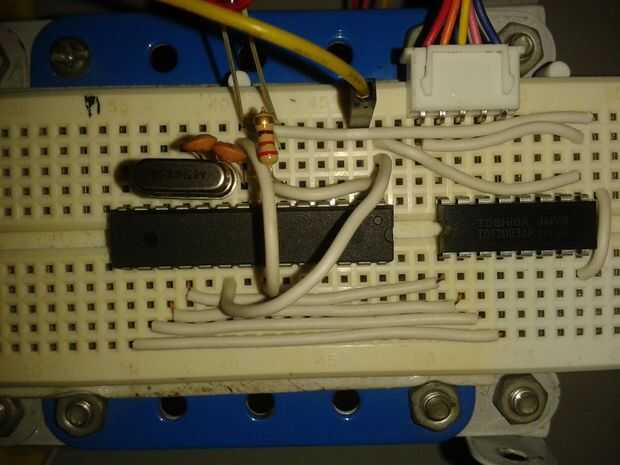
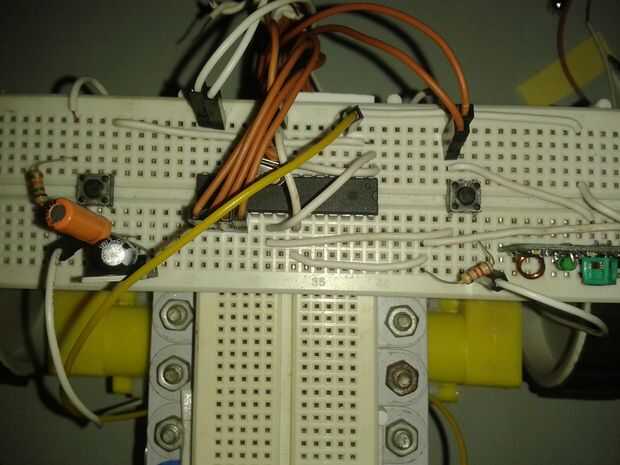
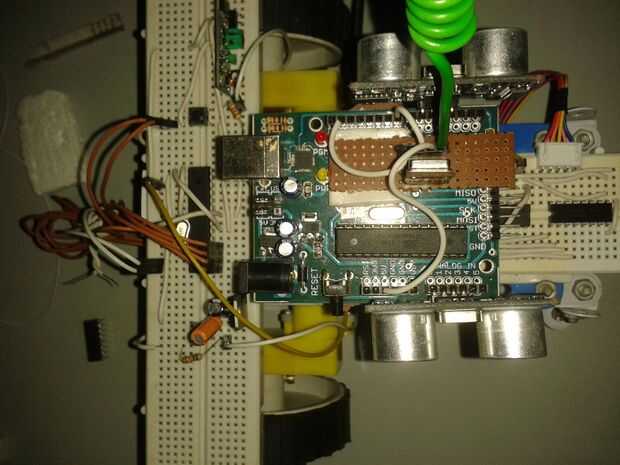
3, hay imágenes de mane cargadas con las etiquetas que describen claramente todas las conexiones Miralos para cualquier ayuda.
4. Cruz - revise todo el cableado de al menos 10 veces, coz un solo cable defectuoso podría poner en peligro tu Atmega (experiencia de la forma que habla). Este paso es el más importante de todos
Inferencia:- Adivina qué, este instructable casi ha llegado a su meta, ya está todo listo.. .y buena para ir pasar al siguiente paso para la codificación de grave.




")

 Stage1Model2")

")
")
 /w Arduino")
")

