Paso 12: Integración de los dibujos - parte 3 (Atmega 2)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
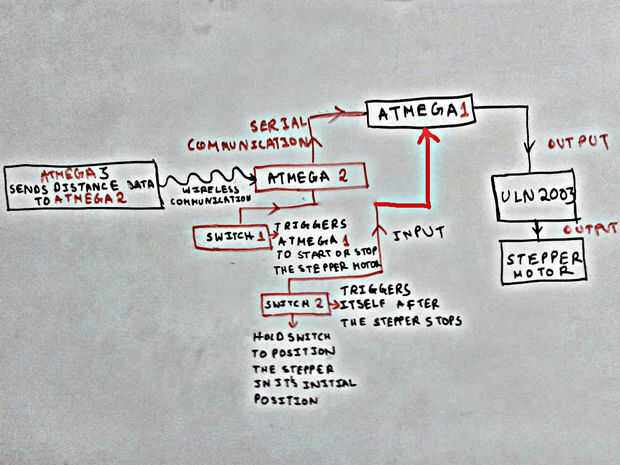
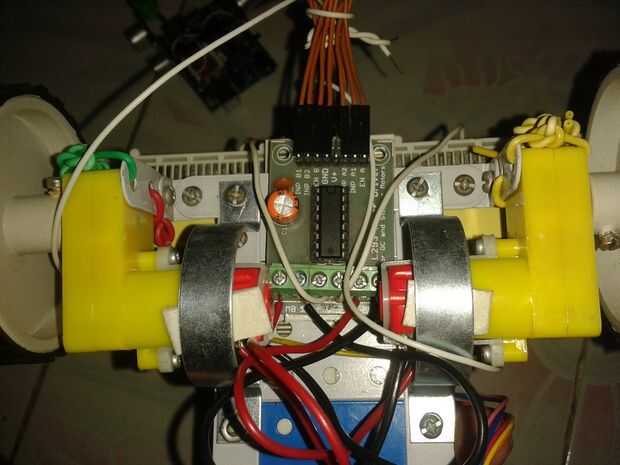
Desde la primera imagen es claramente visible que el Atmega 2 funciona un poco como una madre regulador micro, recibe entrada de Atmega 3, proporciona salida a la interpretación de los datos de distancia, el Motor de la C.C. desencadena el motor de pasos para iniciar o detener para ajustes. Esta es la única razón por qué Atmega 2 se describe en este último paso sobre JAAR. No hay ningún programa de prueba para este no paso... coz delay() se pueden hacer ajustes, coz es el microcontrolador de la madre. Así que todo el tiempo que necesita no se puede cambiar (es posible si se desarrollan más algoritmos más fácil)
Objetivo 1:- a la madre del programa microcontrolador
Cosas necesarias:-
- Sólo un UNO o lo que sea con un Atmega 328 en él
- Cable USB, eso es obvio.
Procedimiento:-
- Espero que tienes la primera imagen se ha convertido en muy claro en tu mente por ahora, si no luego por favor comprobarlo otra vez
- Copie el código ATMEGA_2 .txt en el IDE.
- Minimice el IDE durante algún tiempo.
- Compruebe la imagen 2.
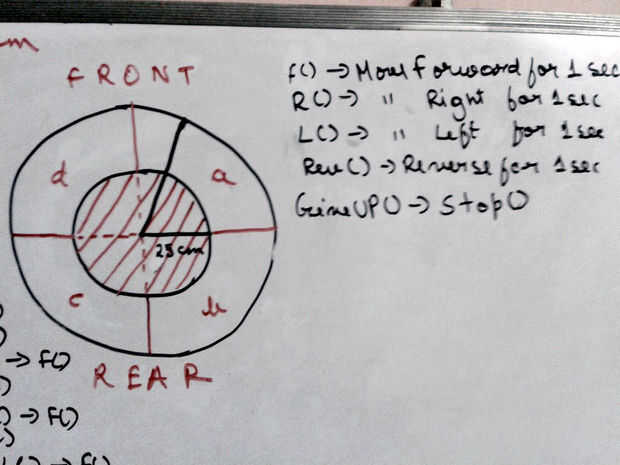
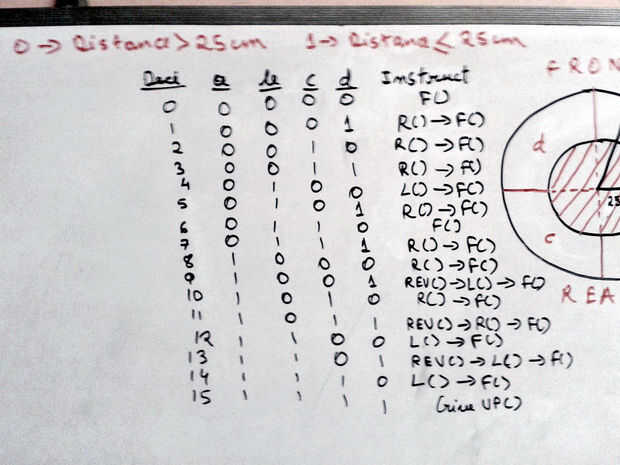
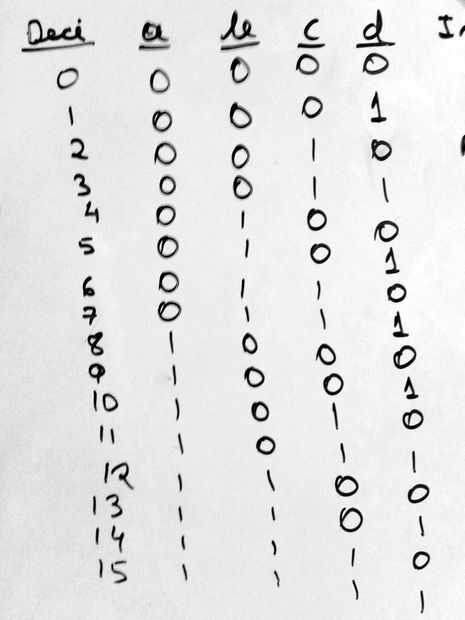
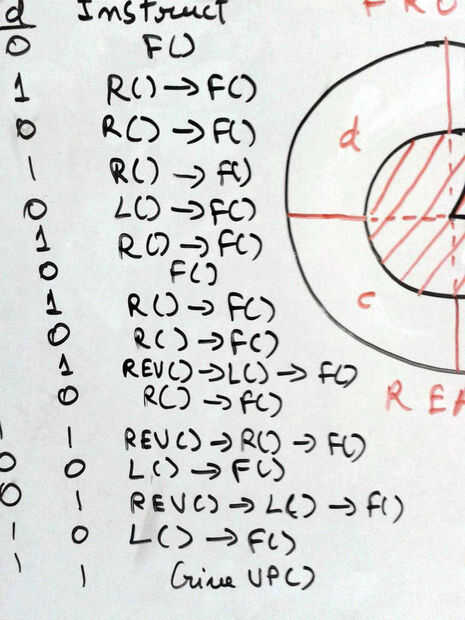
Vea el diagrama, hay una parte sombreada que es la zona de peligro con un radio de 25 cm según mi chasis, realizar cambios en el programa si tienes que.La parte no sombreada es la zona de seguridad que puede tener un radio máximo de 200 cmVer un tipo de Cruz firmar dentro del círculo, que significa en realidad que yo he dividido el área en cuatro partes a, b, c, d respectivamente, para detectar donde los obstáculos son en tiempo real.En la esquina derecha de la segunda imagen es la definición de 5 funciones usadas en el algoritmo.Entender, cómo va a suceder.Echa un vistazo a la imagen 3.Hay una tabla de combinación binaria 4 variable (a, b, c, d), '1' indica que la distancia es de menos de 25 (es decir, en la zona de peligro) y '0' significa que la distancia es mayor de 25 (es decir, en zona segura).Ver también es una variable de salida denominada 'Instruir' que llama a funciones diferentes para diferentes combinaciones.Ambos imagen 2 y 3 al mismo tiempo para comprobar si la llamada de función para una situación específica es apropiada o no. Si hay algo mal que te sientes, por favor, comentar sobre ello aquí.Pero ver que hay dos pasos que usted puede cancelar en tu programa, me informan cuando haya encontrado...Ahora estás listo para subir el código, así que subir al Atmega.Desenchufe el Arduino y extraer el Atmega fuera de él y lo ATMEGA -2Reparar el Atmega a su lugar apropiado.Y estás listo para ir. Apenas energía todo (yo usé una Lipo 3S1P para Atmega 2 y Atmega 2 y una batería común de transistor de 9v para alimentar la Atmega 3).Jugar alrededor con ella, a veces se puede comportar extraña (su debido principalmente al sensor de distancia, no puede evitarlo), cada vez que lo hace, desconectar la alimentación y conéctelo volver otra vez y no olvides ajustar a pasos frente.Comentario acerca de la experienciaInferencia:-
Asta la vista a la programación por el momento, creo que está listo para mover al vehículo. Juega tonto con ella durante algún tiempo.
Aquí Endeth, los dos pasos siguientes trata los problemas con HC-SR04 y lo voy a hacer a continuación.
no dude en informarme acerca de los problemas que vinieron encima terminando este enorme proyecto (al menos me), o usted podría buscalo en google simplemente, google tiene respuesta para todo.




")

 Stage1Model2")

")
")
 /w Arduino")
")

