Paso 5: Engranado C.C. Motor Control (L293D)

Este tutorial es más más fácil y sobre todo importante, esto es lo que hará que el Robot de un Rover
Este tutorial será muy fácil de seguir y no tan complicado código
Objetivo : - para comprobar que dos DC - Motor está funcionando como queremos utilizar un conductor del motor
Cosas necesarias :-
- 2 X a BO Motor de la C.C. (Offset o cualquier otro motor de la C.C. funcionan bien)
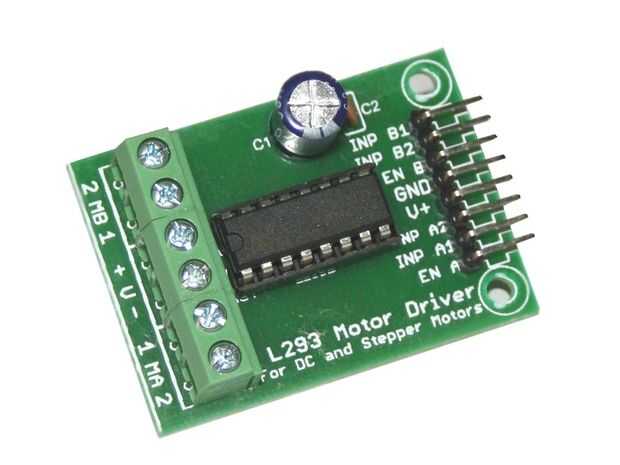
- 1 x módulo de controlador de Motor L293D (puede hacerlo en solitario también).
- 1 x Junta de pan
- Cables de puente (como muchos necesaria)
- 1 x placa de desarrollo Arduino (UNO o lo que sea)
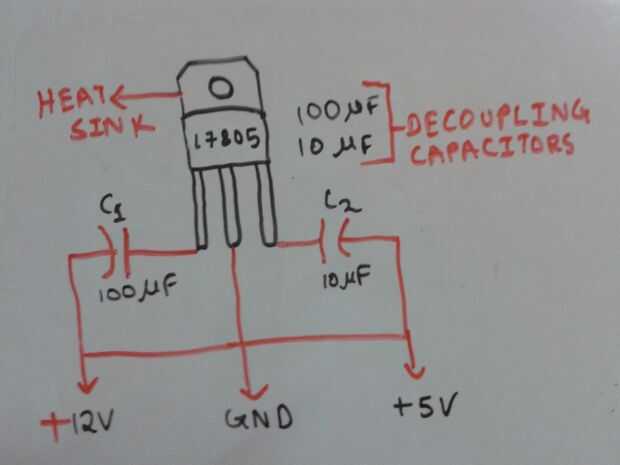
- 1 regulador de voltaje de 5v de X L7805 (del tutorial anterior)
- Condensador electrolítico 10uf x 1 (del tutorial anterior)
- Condensador electrolítico de 100uF x 1 (del tutorial anterior)
- 1 x 100nF condensador de disco de cerámica (opcional)
- Condensador electrolítico de 100uF x 1 (opcional)
- 1 x batería de 9-12 V
Procedimiento:-
- Configurar el regulador de tensión con los tapones de desacoplamiento al igual que el tutorial anterior.
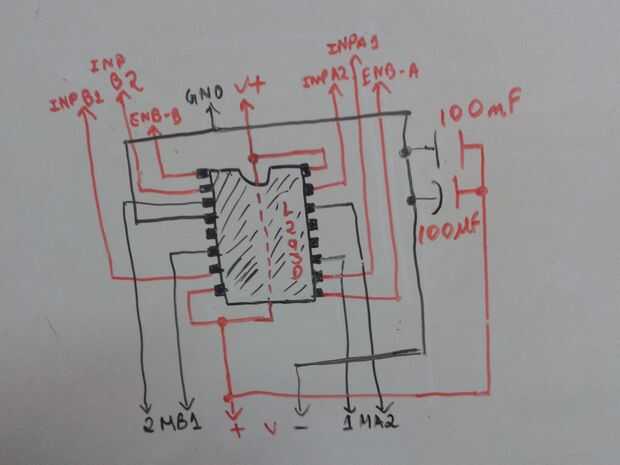
- Como en el esquema de L293D conectar los cuatro terminales del motor DC al conductor Nota : - MA - Motor A.... MB - Motor B, el resultado final de la salida dependerá totalmente de cómo usted conectarse el Motor el conductor.
- Si usted no tiene un módulo del controlador Conecte dos casquillos (100nF y 100uF) en el tablero de pan como se muestra en los esquemas
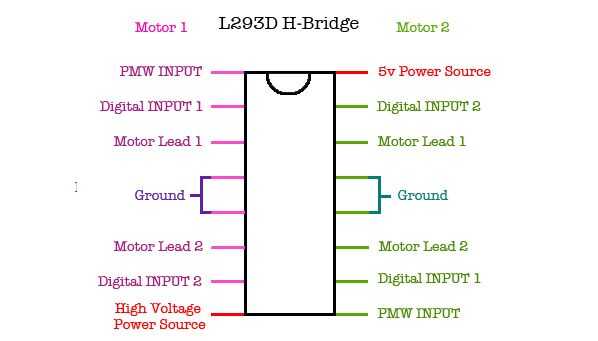
- Las salidas de pin superior, todos ellos a la Arduino excepto el V +, es solo para cualquier fuente de energía alternativa que a1 INP, INP-A2, B2 INP, INP-B1 va a Arduino pin 2,3,4,5
- Conecte el Vin como se muestra en la imagen, la línea punteada divide el conductor realmente significa que el cable está bajo el motor Driver, uso sus habilidades de análisis y hacer la conexión correctamente tenga en cuenta: - incorrecta conexión puede dañar permanentemente su Motor Driver (lo sé por experiencia)
- Conecte la inferior V + y V - a la batería
- Entender y cargar el programa en el Atmega.
- por favor no seas perplejo ver resultados inesperados, sólo por usted conexión motor
- Jugar con el código, cambiar la s delay(), agrega nueva función y hacer algunos experimentos
- Cambiar el patrón de los impulsos de entrada para que coincida con usted conexión Motor
Conclusión :- puede llegar alguna sugerencia acerca de cómo el robot se va a trabajar, claramente voy a definir lo que va a esperar para IT Mantenerme informado con dudas y sugerencias.




")

 Stage1Model2")

")
")
 /w Arduino")
")

