Paso 8: JAAR - un Robot autónomo (el concepto)



Obteniendo la recta hasta el punto de
Cosas primarias requeridas:-
- 1 X chasis con dos DC - Motor y rueda fija (Figura 1)
- 2 x Atmegas microconttroller
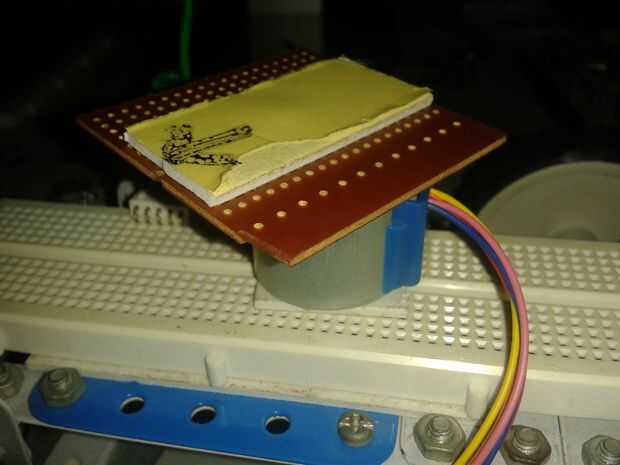
- 1 x Motor de pasos (28BYJ-48 5V) con una plataforma (Figura 2)
- 1 módulo X RF - RX y TX (Figura 3)
- 1 x placa de desarrollo Arduino con un microcontrolador Atmega 328 pu (Figura 3)
- 2 X HC-SR04 (Figura 3)
- 1 X ULN 2003
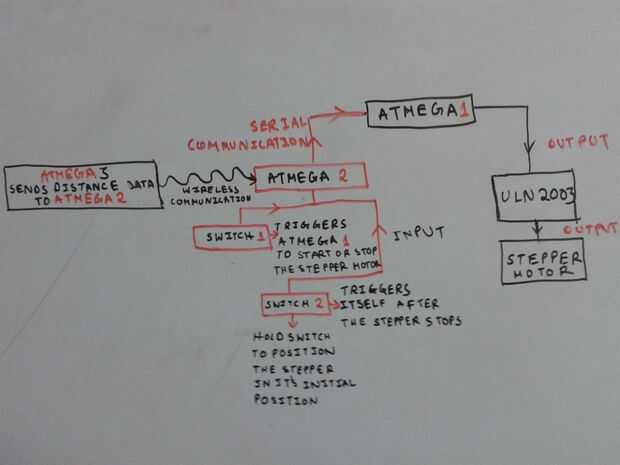
Cómo todo funciona:-
- Revisa la imagen 3. Se trata de la sección de transmisor
- La sección del transmisor será sobre la plataforma del Motor de pasos.
- Ahora usted puede obtener una idea sobre el concepto, yahh usted acertó la plataforma entera girará con el Motor de pasos
- La plataforma giratoria de transmisor enviará datos sin hilos distancia de ambos la HC-SR04 cada grados 5,625 se trasladó desde la posición inicial que es exactamente 64 pasos para el Motor paso a paso
- Este paso a paso va 4096 pasos de 1 rotación completa. Cada 64 pasos que el sensor de distancia se ping (activados) y los datos de distancia se enviará wireless a otro Atmega que se fija a la mesa de pan
- Así habrá 4096 / 64 distancia datos por HCsr04, que es de 128 datos de la distancia totales a 2 HCSR04
- Se procesarán los 128 datos que se ha transmitido y se creará un mapa SONAR de los obstáculos dentro de 200 cm y se actualizará después de cada rotación.
- Elaboración del mapa del MOTOR de la C.C. va a reaccionar a los obstáculos
Donde se encuentra el problema:-
1. el sonido es en sí mismo el problema, se absorbe, refleja y necesita una buena cantidad de área para realmente detectar cualquier obstáculo
2. Si se desenchufa el robot entero mientras que está girando el Motor paso a paso consigue fuera de lugar desde su posición inicial otra vez mientras que la puesta en marcha el robot piensa que la posición fuera de lugar que su posición inicial.
Solución:-
1. este paso no se puede cambiar por ahora, pero seguramente haré en algún momento más adelante en, en otro Instructable
2. revisa la última imagen para ver su solución. La idea muy simple, un ser humano necesita ajustarlo.
Vea Qué interesante se ha convertido ahora, hemos recorrido un largo camino de contra rebotes un interruptor. Pero ver su otro obstáculo evitando robot, solo viene con un concepto diferente.
Para cualquier duda o sugerencia no dude en comentar




")

 Stage1Model2")

")
")
 /w Arduino")
")

