Paso 2: Montaje del circuito
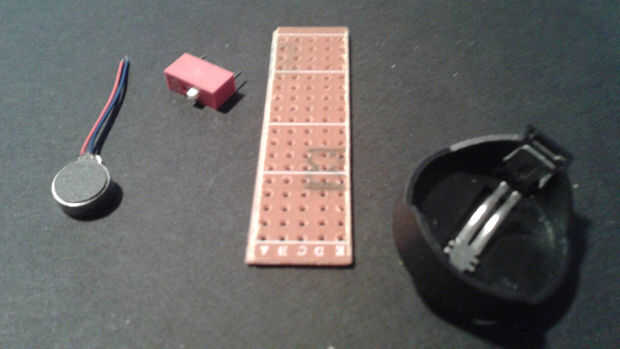
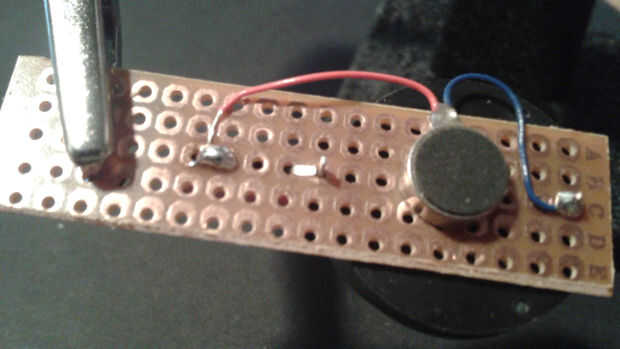
Este es un circuito muy simple. La batería se conecta al motor vibrante con un interruptor para interrumpir el flujo de electricidad.
Este proyecto requiere de soldadura. Si no sabes cómo no traste hay un montón de tutoriales aquí en Instructables para empezar. Sea paciente y tendrás abajo en ningún momento.
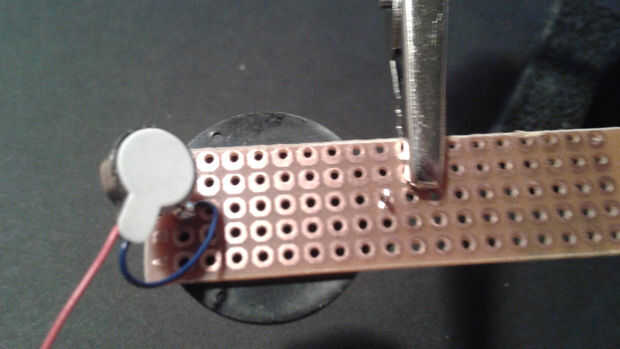
Primero os adjunto el soporte de la batería. Tiene un lado plano que es más alto que el resto del titular. El puesto de soldadura en este lado es el polo positivo. Este lado se enfrentará a la Junta mientras que el lado curvo es el exterior. Puse el titular en su lugar en el circuito, doblar las lengüetas para sujetar en su lugar y recortada en mi ayuda herramienta de mano.
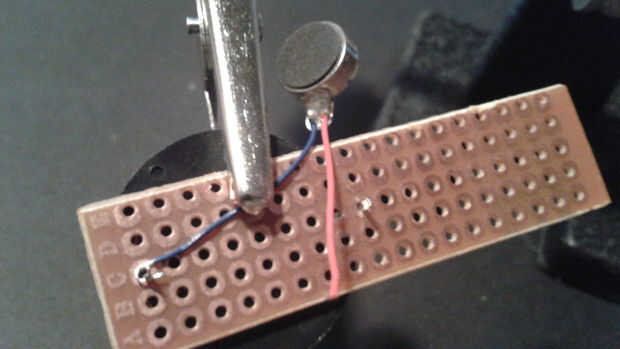
El motor de vibración posee 'polaridad', lo que significa que si está conectado al revés no funcionará. Use un pelacables para quitar un poco de aislamiento desde el extremo de los cables del motor. Ahora mira la batería CR2032. Un lado es liso con una envoltura de labio en los lados y tiene algo como ' celda de litio CR2032 3v +' impreso en él. Este es el terminal positivo de la batería. El otro lado generalmente textured. Este es el terminal de tierra. El sujetador de la batería con el cable rojo en el lado positivo y el cable azul en el terminal de tierra. Debe vibrar. Desconectar los cables alrededor de la roja va a la tierra y el azul va a positivo. Ahora el motor no funcionará. Asegúrese de que tener la polaridad correcta antes de soldar el motor los cables en su lugar.
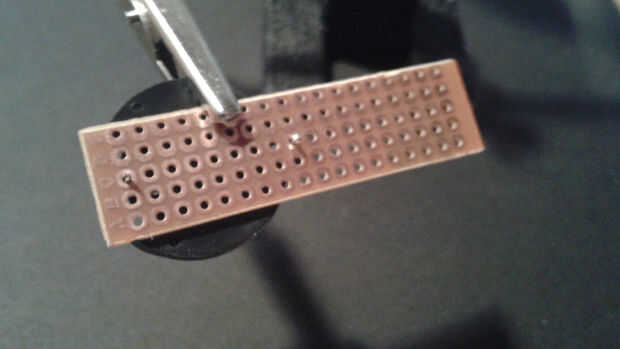
Ahora mira el soporte de la batería. Tiene dos contactos: uno para el lado de tierra plana y el otro para conectar el borde positivo de la batería. Determinar qué batería contacto conecta a que post de la soldadura. Cuidadosamente soldar el cable a tierra azul motores al poste de tierra los titulares de la batería. Con cuidado retirar el adhesivo protector de motor y fijarla a la placa bajo el soporte de la batería. Deje sin conectar el cable rojo positivo por ahora.
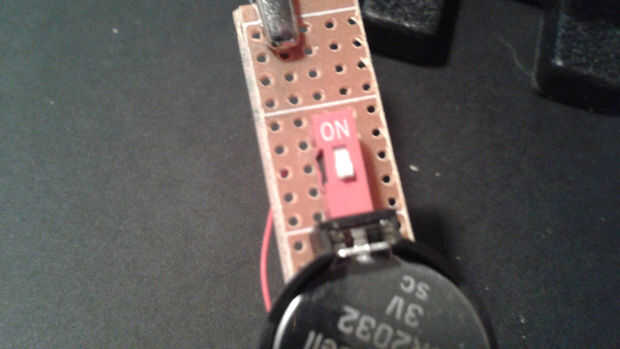
A continuación instalamos el interruptor DIP de 1 bit. organizar conforme a la placa de circuito al ras con el lado plano de los titulares de la batería para que el poste positivo de la batería está cerca de uno de los mensajes de interruptor. Doble las lengüetas de interruptor DIP en hold en el tablero y soldar el cable rojo del motor en el otro post de interruptor. Por último, doble borne positivo del portapilas y post libre del interruptor hacia los demás y soldarlos juntos. El circuito está completo. Instale la batería y girar el interruptor a la función del circuito de prueba. Debe vibrar ahora. Si no volver sobre sus pasos, comprobar sus empalmes de la soldadura y asegurar que tenga la polaridad correcta de las conexiones del motor.











")

