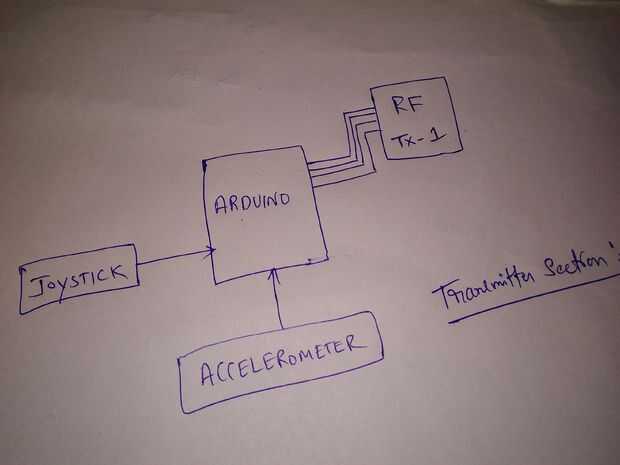
Paso 6: Código de Tx1:-Adxl335 y Joystick
int inPin = 10; el número de la entrada de pin
int outPin = 13; el número de los pines de salida
int estado = alta; el estado actual del pin de salida
int leer; la lectura actual del pin de entrada
int anterior = bajo; la lectura anterior de la entrada de pin
byte com = 0;
int gndpin = A6;
const int xpin = A2; eje x del acelerómetro
const int ypin = A3; eje y del acelerómetro
int xpin = A0; j x
int ypin = A1; j y
int x = 0;
int y = 0;
tiempo = 0; la última vez que el pin de salida fue fijado
tiempo de debounce = 200; el tiempo de debounce, aumenta si la salida parpadea
void setup()
{
pinMode (inPin, entrada);
pinMode (outPin, salida);
pinMode (gndpin, salida);
digitalWrite (gndpin, bajo);
pinMode(5,OUTPUT); A11 de tx RF 1
pinMode(4,OUTPUT); A10
pinMode(3,OUTPUT); A9
pinMode(2,OUTPUT); A8
pinMode (6, salida);
pinMode (7, salida);
pinMode (8, salida);
pinMode (9, salida);
Serial.Begin(9600);
}
void loop()
{
lectura = digitalRead(inPin);
Delay(200);
Si (leer == alto & & anterior == baja & & millis() - tiempo > debounce) {}
Si (estado == HIGH)
estado = bajo;
otra cosa
Estado = alta;
tiempo = millis();
}
digitalWrite (outPin, estado);
anterior = lectura;
if(digitalRead (outPin) == HIGH)
{
Si ((analogRead(ypin) > 400) & &(analogRead(xpin) Serial.println('1');
digitalWrite(2,LOW); 5
digitalWrite(3,HIGH); 6
digitalWrite(4,HIGH); 10
digitalWrite(5,LOW); 11
}
else if ((analogRead(ypin)940) & &(analogRead(ypin)>400)) {/ / al revés
Serial.println('2');
digitalWrite(2,HIGH); 5
digitalWrite(3,LOW); 6
digitalWrite(4,LOW); 10
digitalWrite(5,HIGH); 11
}
else if ((analogRead(ypin)400) & &(analogRead(xpin) Serial.println('4');
digitalWrite(2,LOW); 5
digitalWrite(3,LOW); 6
digitalWrite(4,LOW); 10
digitalWrite(5,HIGH); 11
}
else if ((analogRead(ypin) > 900) & & (analogRead(xpin)400)) {/ / derecha
Serial.println('6');
digitalWrite(2,LOW);
digitalWrite(3,HIGH);
digitalWrite(4,HIGH);
digitalWrite(5,HIGH);
}
else if ((analogRead(ypin) > 400) & & (analogRead(xpin)440)) {/ / stop
Serial.println('0');
digitalWrite(2,HIGH);
digitalWrite(3,HIGH);
digitalWrite(4,HIGH);
digitalWrite(5,HIGH);
}
}
otra cosa if(digitalRead (outPin) == LOW)
{
x = analogRead(A4);
y = analogRead(A5);
Delay(200);
Si (((x240)) & & ((y>300) & & ({y}
Serial.println('1');
digitalWrite(2,LOW); 5
digitalWrite(3,HIGH); 6
digitalWrite(4,HIGH); 10
digitalWrite(5,LOW); 11
}
else if (((x360)) & & ((y>305) & & ({y}
Serial.println('2');
digitalWrite(2,HIGH); 5
digitalWrite(3,LOW); 6
digitalWrite(4,LOW); 10
digitalWrite(5,HIGH); 11
}
else if (((y370)) & & ((x>320) & & (x Serial.println('4');
digitalWrite(2,LOW); 5
digitalWrite(3,LOW); 6
digitalWrite(4,LOW); 10
digitalWrite(5,HIGH); 11
}
else if (((x280)) & & ((y>240) & & ({y}
Serial.println('6');
digitalWrite(2,LOW);
digitalWrite(3,HIGH);
digitalWrite(4,HIGH);
digitalWrite(5,HIGH);
}
else if (((x300)) & & ((y>300) & & ({y}
Serial.println('0');
digitalWrite(2,HIGH);
digitalWrite(3,HIGH);
digitalWrite(4,HIGH);
digitalWrite(5,HIGH);
}
}
}








")




