





















En detalles, que quería construir para un amigo mío (Kim), un sistema con un jugador robótico que los usuarios deben ser capaces de control sobre la internet, a través de una aplicación de Facebook con un portero automático. Los usuarios serán capaces de controlar el ángulo y la potencia de la patada, pero no tienen control sobre el portero, que se mueve al azar de izquierda a derecha, después de que el jugador ejecuta el comando para patear la pelota. Programé un retraso de 4-5 segundos después de que el jugador hace la selección de ángulo y potencia y el portero se pone en movimiento.
El usuario de la aplicación debe ser capaz de controlar la posición (ángulo) y la potencia de la patada de la bola desde una aplicación de FB.
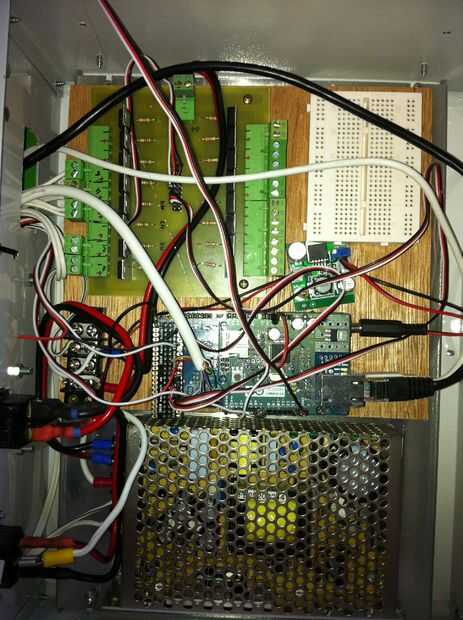
Mi primer pensamiento fue utilizar Arduino como mi microcontrolador principal.
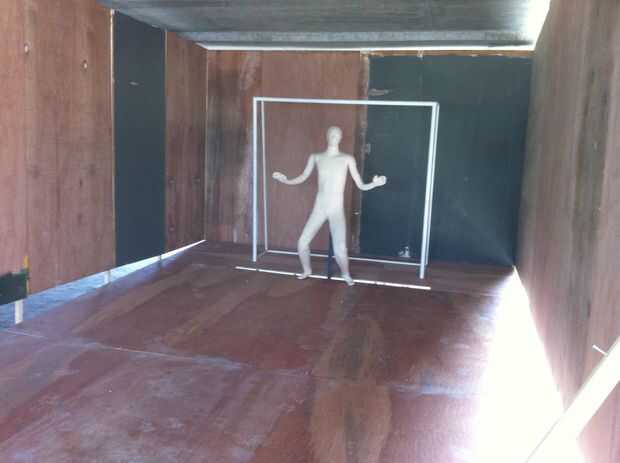
Aquí están algunas fotos del proceso de construcción.
Ahora el juego es en línea y usted puede jugar en la siguiente dirección o "incluso guste"... https://www.Facebook.com/Str8myway/app_316992568367853
Sólo tienes que seleccionar "Jugar al Juego de" después de seleccione "ΠΑΙΞΕ ΤΩΡΑ" es en griego y que significa "jugar ahora"
Entonces usted está en que, cuando es tu turno, poder seleccionar de la patada, entonces el ángulo (en la bola) y presione el botón de golpe.
-----------------------------------------------------------------------------------------------------------------------------------------------------------
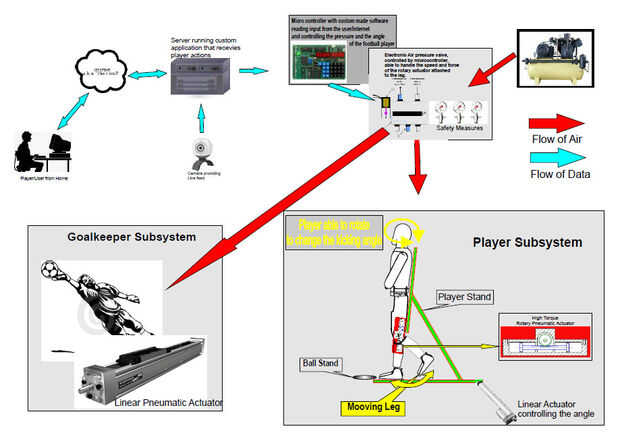
El hardware principal es:
Arduino Mega, con escudo de Ethernet
PCB personalizado para voltajes más altos de unidad con Arduino
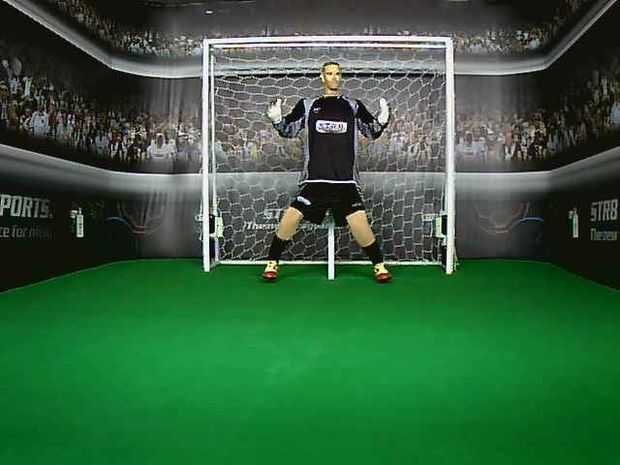
Hardware para el portero (carriles para avanzar, interruptores para reconocer los bordes y el centro, fuente de alimentación)
Hardware para el jugador (sistema neumático para patear la bola, válvulas electrónicas de diferente presión, servo para encender el reproductor, compresor de aire)
Fuente de alimentación y convertidor DC-DC
---------------------------------------------------------------------------------------------
Grandes retos:
Comunicación por internet, video y datos retrasar problemas,
Problemas de sincronización con el mundo real y el robot,
la sigue el movimiento del portero
presión de aire y la velocidad de patadas no fue suficiente incluso la potencia del pistón era enorme








")




