Paso 6: Lectura de RX (y recibido)
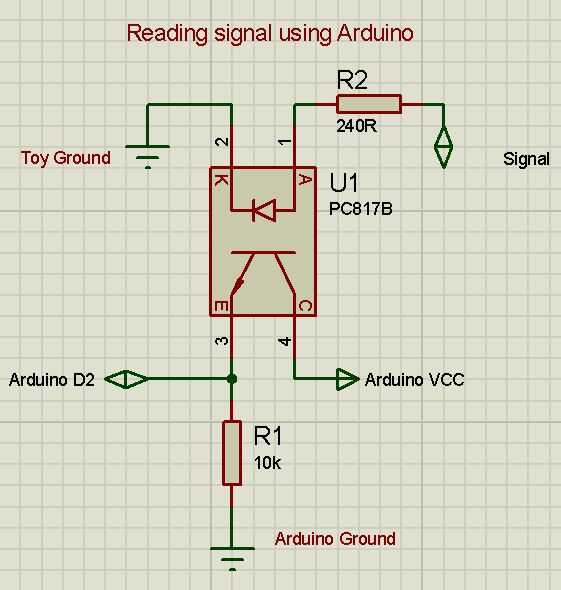
Utilizando el mismo circuito para leer TX y conectar Arduino pin 2 al pin 7 (VO2) que podía leer los códigos enviados de Texas, un poco diferente debido a 5660 pulso de micros y micros intervalos de ABERX69.
208 280 340 384 748 5660 272 320 360 400 1296 776 464 480 488 496 504 508 512 832 5704 260 316 348 384 1276752 444 452 468 468 476 484 488 816 5684
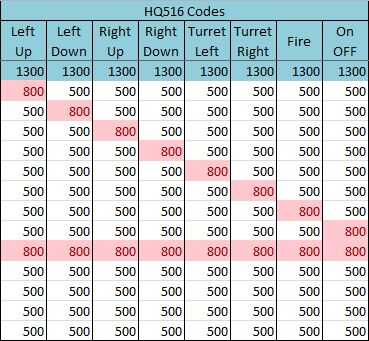
Pero podemos ver mismo largo pulso alrededor de 1300 micros, 2 pulsos alrededor de 800 e intermediarios pulsos.
Leyendo algunos posts he entendido que demora está relacionada con el microcontrolador de juguete, pero no estoy seguro.
Todos los comandos de lectura, hice la tabla anterior.



")


")






