Paso 4: Paso 6 más información sobre el código
Microcontrolador pseudo código
Retraso de 42 segundos al principio (7, demora de 6 segundos)
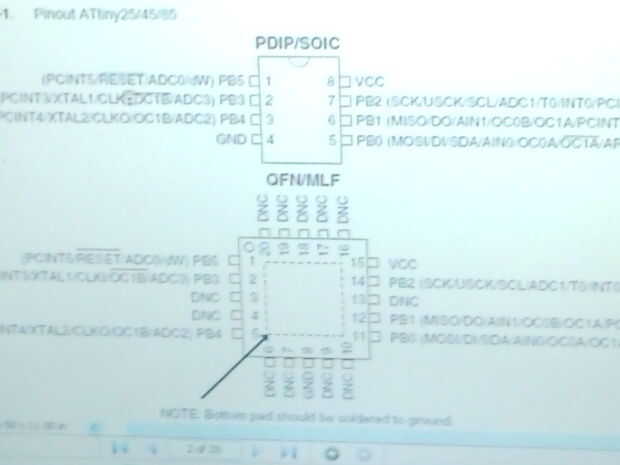
Puerto 4 (motor) es la salida
Puerto 3 es la entrada (sensor de movimiento)
Si el sensor de movimiento = 5 V, girar el motor durante 12 segundos
Luego apague
El código de C
#include < avr\io.h > / / son instrucciones de entrada y salidas
#define F_CPU 1000000UL / / velocidad del procesador es de 1 MHz
#include < util\delay.h > / / incluye función de retardo
int Main
{
_delay_ms(6000); retardo de 6 segundos
_delay_ms(6000); retardo de 6 segundos
_delay_ms(6000); retardo de 6 segundos
_delay_ms(6000); retardo de 6 segundos
_delay_ms(6000); retardo de 6 segundos
_delay_ms(6000); retardo de 6 segundos
_delay_ms(6000); retardo de 6 segundos
DDRB | = (1 << 4); definir 4 PORTB como salida, resto entradas
while(1)
{
Si (PINB & 0x08) / / si se detecta movimiento en PORTB3
{
PORTB | = (1 << 4); Apague el motor en
_delay_ms(6000); retardo de 6 segundos
_delay_ms(6000); retardo de 6 segundos
PORTB = 0 X 00; Apague el motor
}
}
}
 3v")




 (PIR)")


")

")


